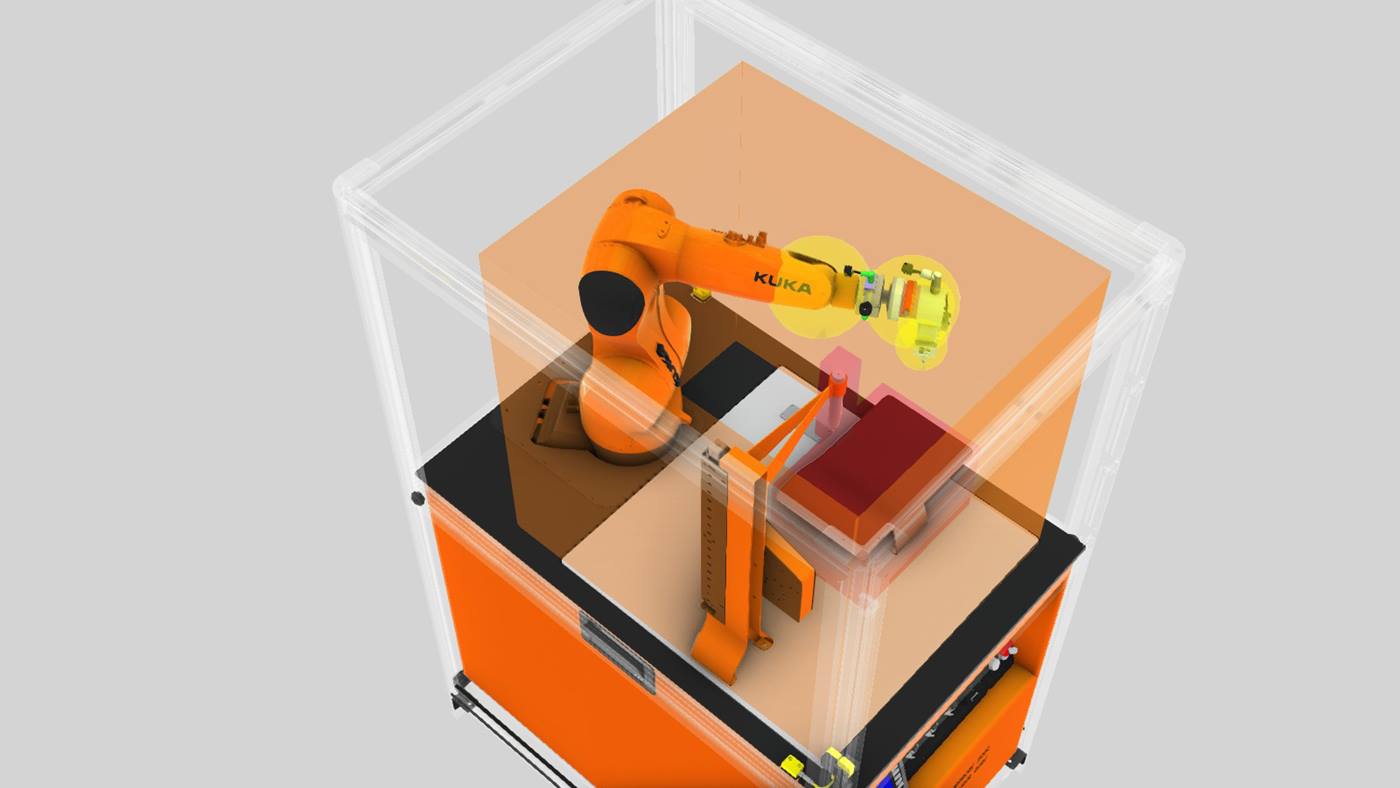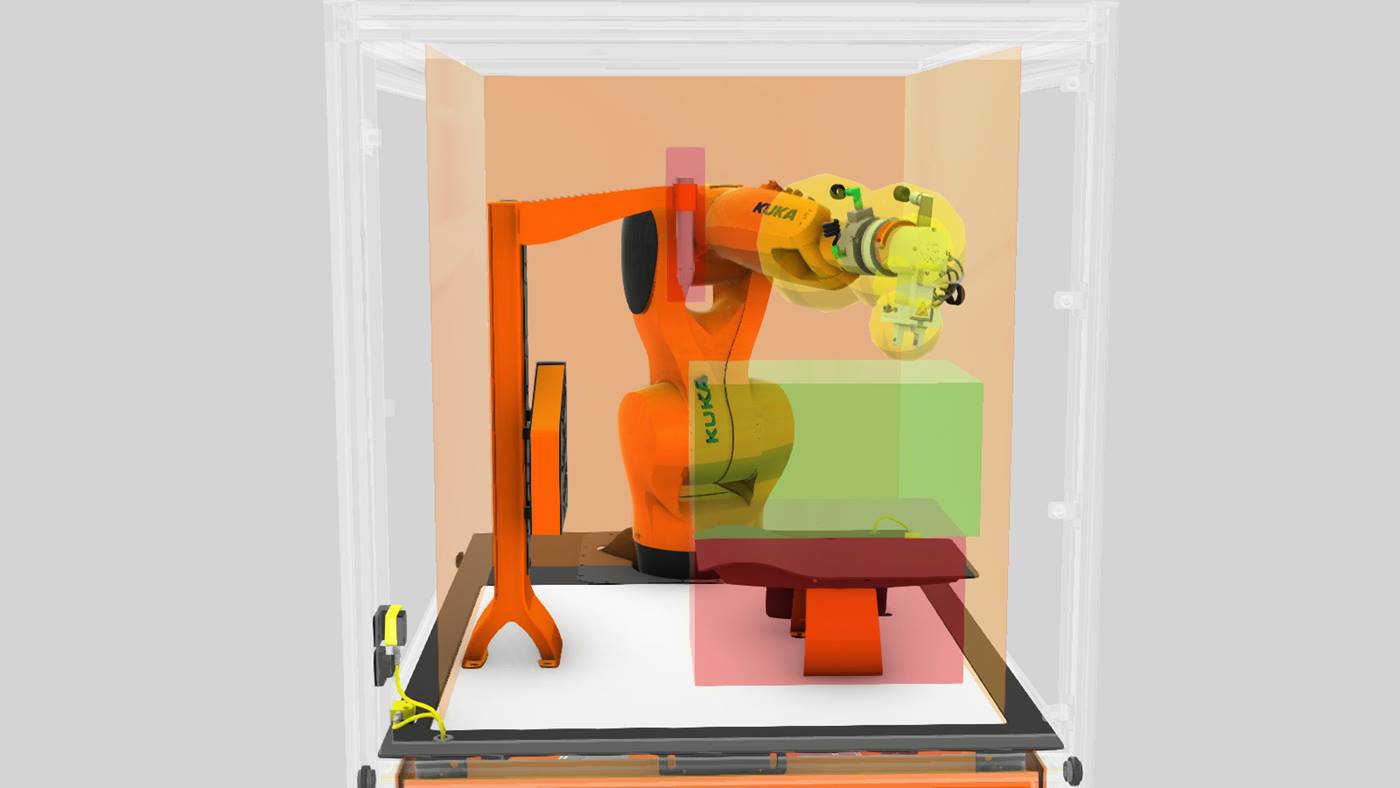
Zonas de control con KUKA.SafeOperation
El punto de interés es la seguridad. El software proporciona una reducción segura del campo de trabajo teórico hasta 16 zonas de control y una zona fija de celdas. La definición de dichas zonas de control determina el comportamiento del robot.
Cada zona puede determinarse individualmente. Elija entre la definición cartesiana o específica del eje. Además, podrá distinguir entre estos tipos de espacio:
- Campo de trabajo
- Zona de protección
- Zona de aviso y protección (no se para)
- Zona de aviso y trabajo (no se para)
- Zona de celda (no conmutable)