卫生要求提高,可持续的解决方案
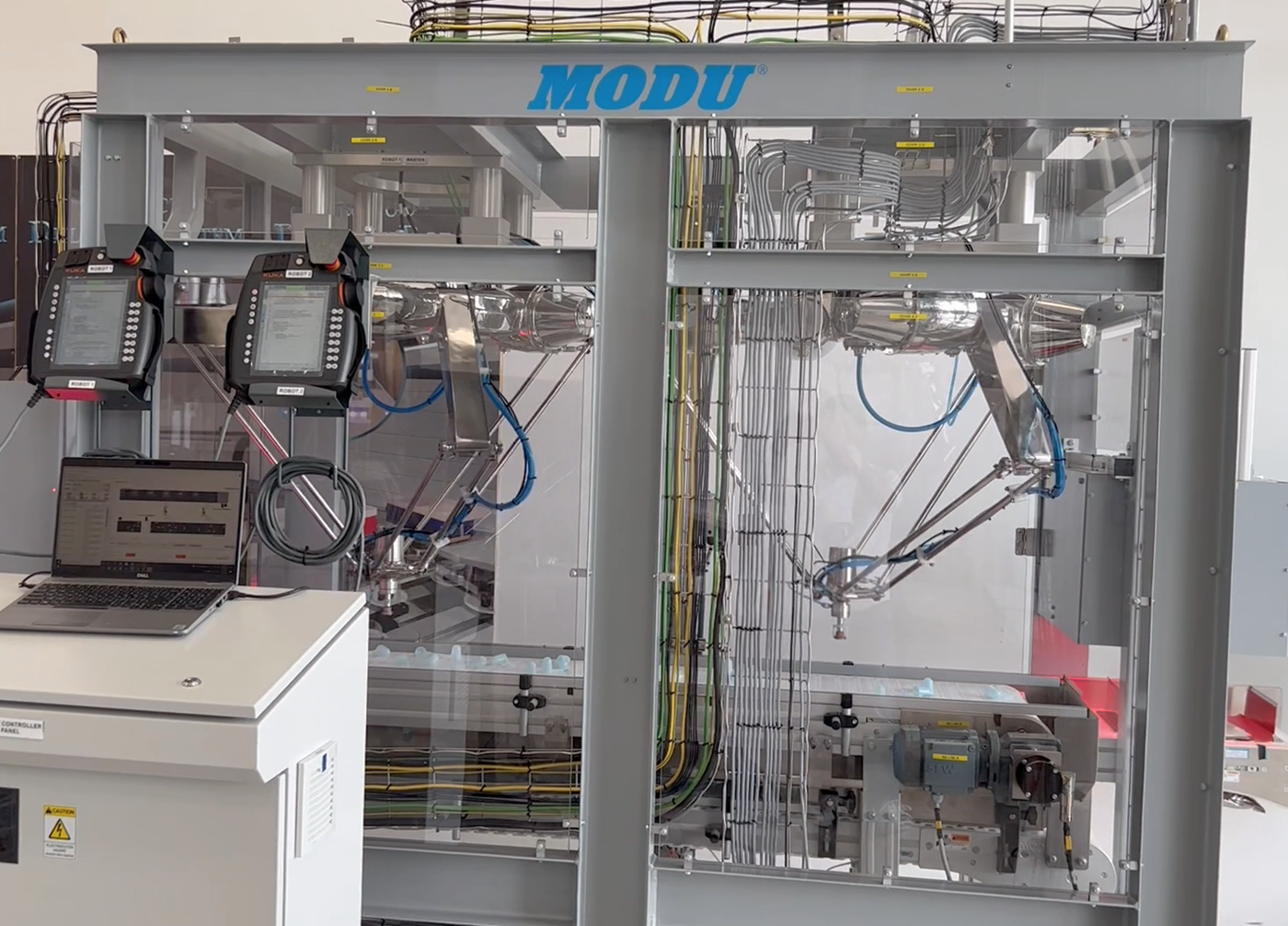
卫生是食品安全的一项基本组成要素——同时也是食品行业面临的一项挑战。其中重要事项主要有:对生产环境的卫生要求提高、区域和设备的清洁和消毒,以及保证工作人员经过培训且身体健康。马来西亚系统集成商 MODU System 希望运用自己掌握的机器人辅助自动化解决方案的核心知识,为食品行业提供支持。这家企业得到了 KUKA 的鼎力相助,因为 KUKA 的产品中正好有符合这些要求的理想机器人:KR DELTA。“我们希望客户能给予我们信任。”MODU System 公司区域经理 Rajinderjit Singh 说,“因此,我们大力投入资源开展技术研发,并与以 KUKA 为代表的合作伙伴开展密切合作,以求找到更加可持续的机器人技术解决方案。”