Exigências crescentes de higiene, soluções sustentáveis
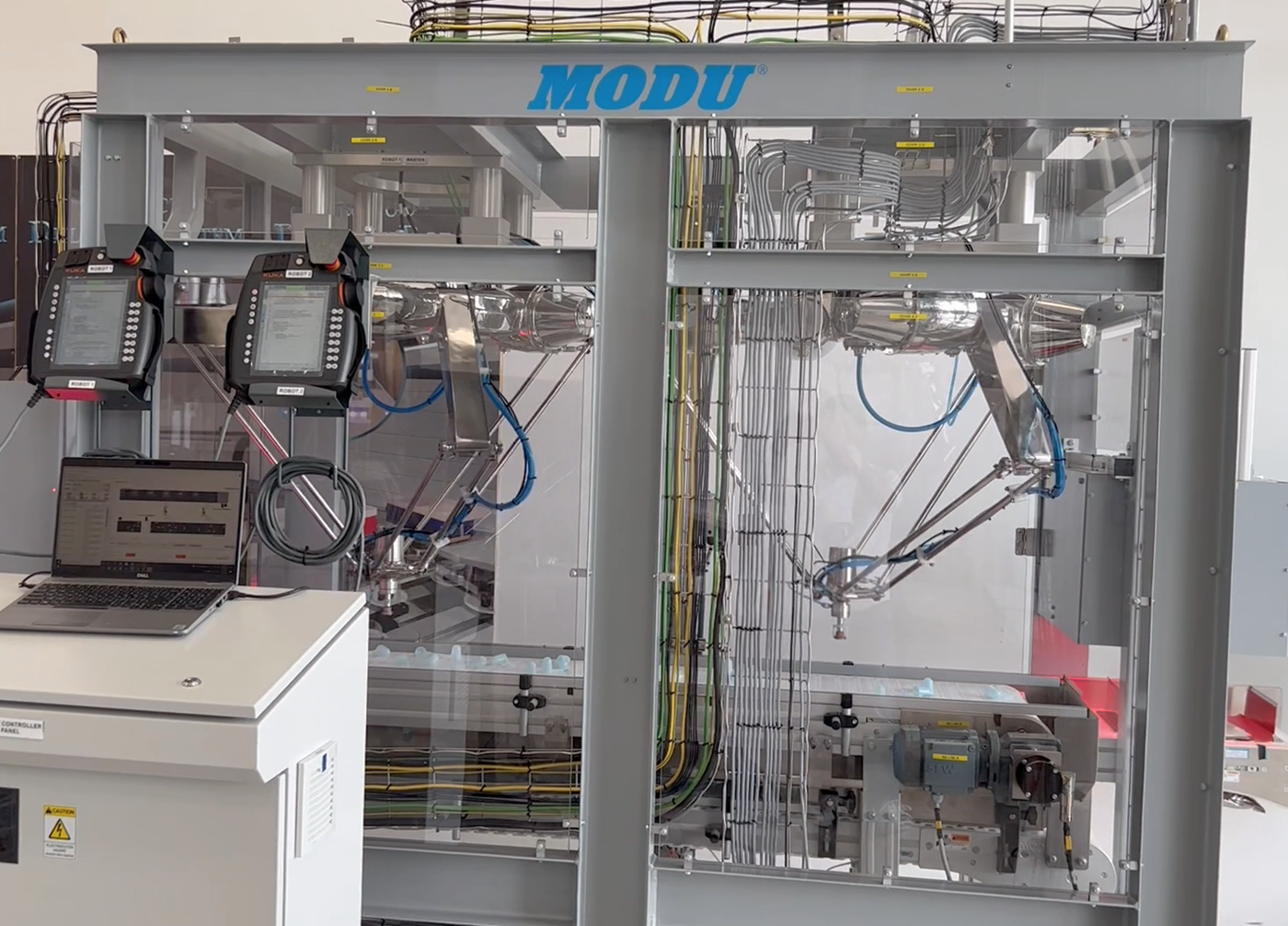
A higiene é uma parte integrante elementar da segurança alimentar – e é um desafio na indústria de alimentos. Entre outros pontos importantes estão os crescentes requisitos de higiene para as instalações de produção, a limpeza e a desinfecção de superfícies e equipamentos, mas também um pessoal treinado e saudável. O integrador de sistema malaio MODU System deseja apoiar o ramo com o seu know-how para soluções de automação baseadas em robô. A empresa recebe o auxílio da KUKA, que tem o robô ideal para estes requisitos em seu portfólio: o KR DELTA. "Queremos que nossos clientes tenham confiança em nós", diz Rajinderjit Singh, Gerente Regional da MODU System. "Por isso investimos muitos recursos no desenvolvimento de tecnologias e trabalhamos em estreita cooperação com parceiros como a KUKA, para encontrar uma solução mais sustentável para a robótica."