การเพิ่มประสิทธิภาพบนสายพาน
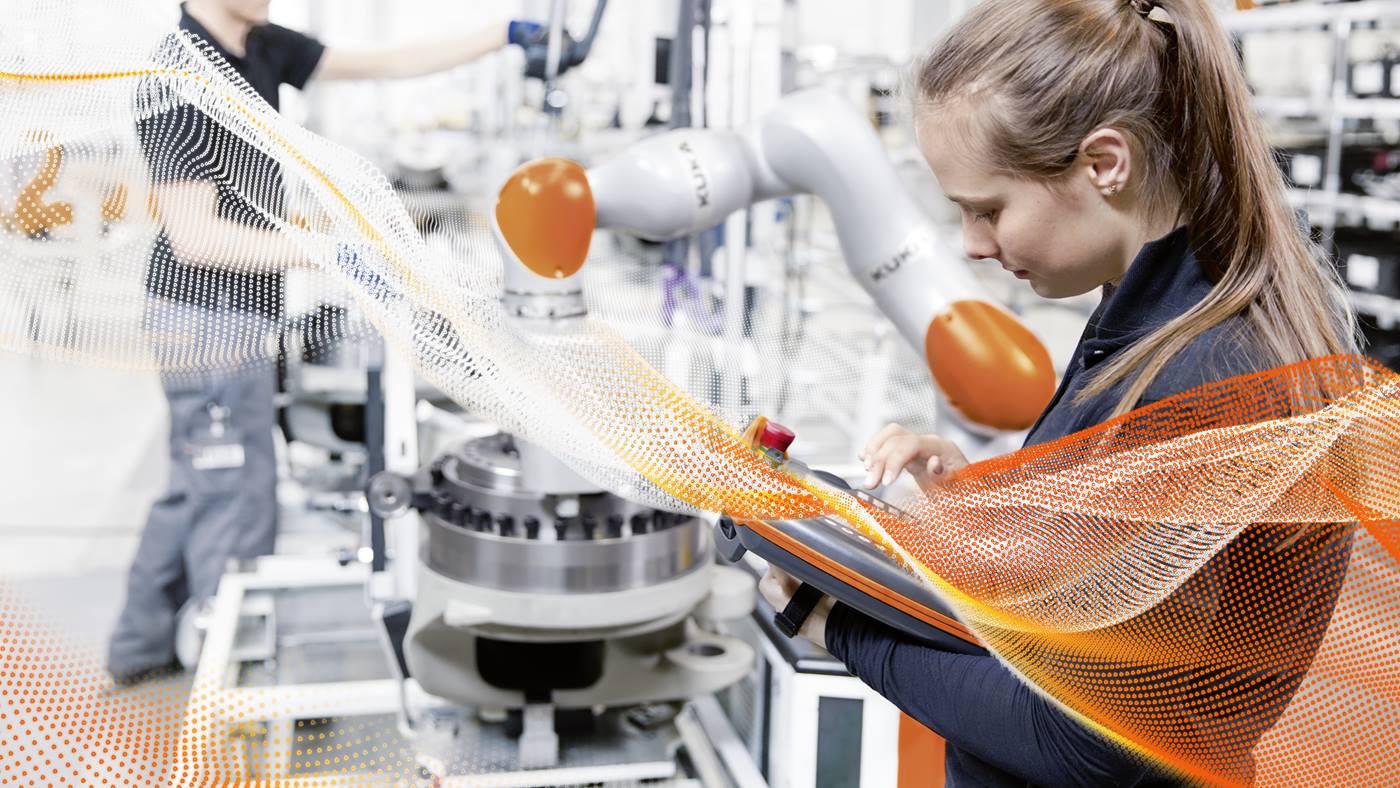
สายพานในโรงงานประกอบชิ้นส่วนของผู้ผลิตยานยนต์จะเคลื่อนที่ตัวถังรถที่ประกอบแล้วบางส่วนไปตามเส้นทางสายการผลิตขณะที่คนงานประกอบชิ้นส่วนจะประกอบชิ้นส่วนอื่น ๆ เป็นช่วงจังหวะ หรือทำการตรวจสอบคุณลักษณะด้านคุณภาพ ความเร็วของสายพานถูกปรับให้เหมาะกับช่วงจังหวะของมนุษย์เพื่อที่จะสามารถทำการประกอบชิ้นส่วนหรือการแก้ไขปรับปรุงชิ้นส่วนประกอบบนสายพานที่วิ่งอยู่ได้ มนุษย์และหุ่นยนต์ต้องทำงานร่วมกันเพื่อที่จะเพิ่มประสิทธิภาพบนสายพาน หุ่นยนต์โครงสร้างเบาที่ตอบสนองไว KUKA LBR iiwa เหมาะอย่างยิ่งสำหรับงานประเภทนี้เนื่องจากสอดคล้องกับ ข้อกำหนดด้านความปลอดภัยสูงสุด และสามารถตอบสนองต่อการสัมผัสแต่ละครั้งของคนงานโดยทันทีและปรับให้เหมาะกับสถานการณ์ได้