การทำให้เครื่องจักรเครื่องมือเป็นอัตโนมัติด้วยการเชื่อมต่อที่คลาวด์
ในขั้นต้นโรงการผลิต ฮอลล์ 10 บนพื้นที่ของ KUKA ในเมือง Augsburg ทำหน้าที่เช่นเดียวกับสภาพแวดล้อมการผลิตทั่วไปสำหรับผู้ผลิตเครื่องจักรจากเยอรมนีและนานาชาติ สิ่งที่ไม่สามารถมองเห็นได้โดยตรง: เซลล์ทั้งเจ็ดซึ่งหุ่นยนต์ KUKA สิบเอ็ดตัวทำงานร่วมกับเครื่องมือเครื่องจักรที่มีขายทั่วไปจากผู้ผลิตหลายราย ถูกเชื่อมต่อกับคลาวด์และมีฟังก์ชั่นอุตสาหกรรม 4.0 ที่แตกต่างกัน
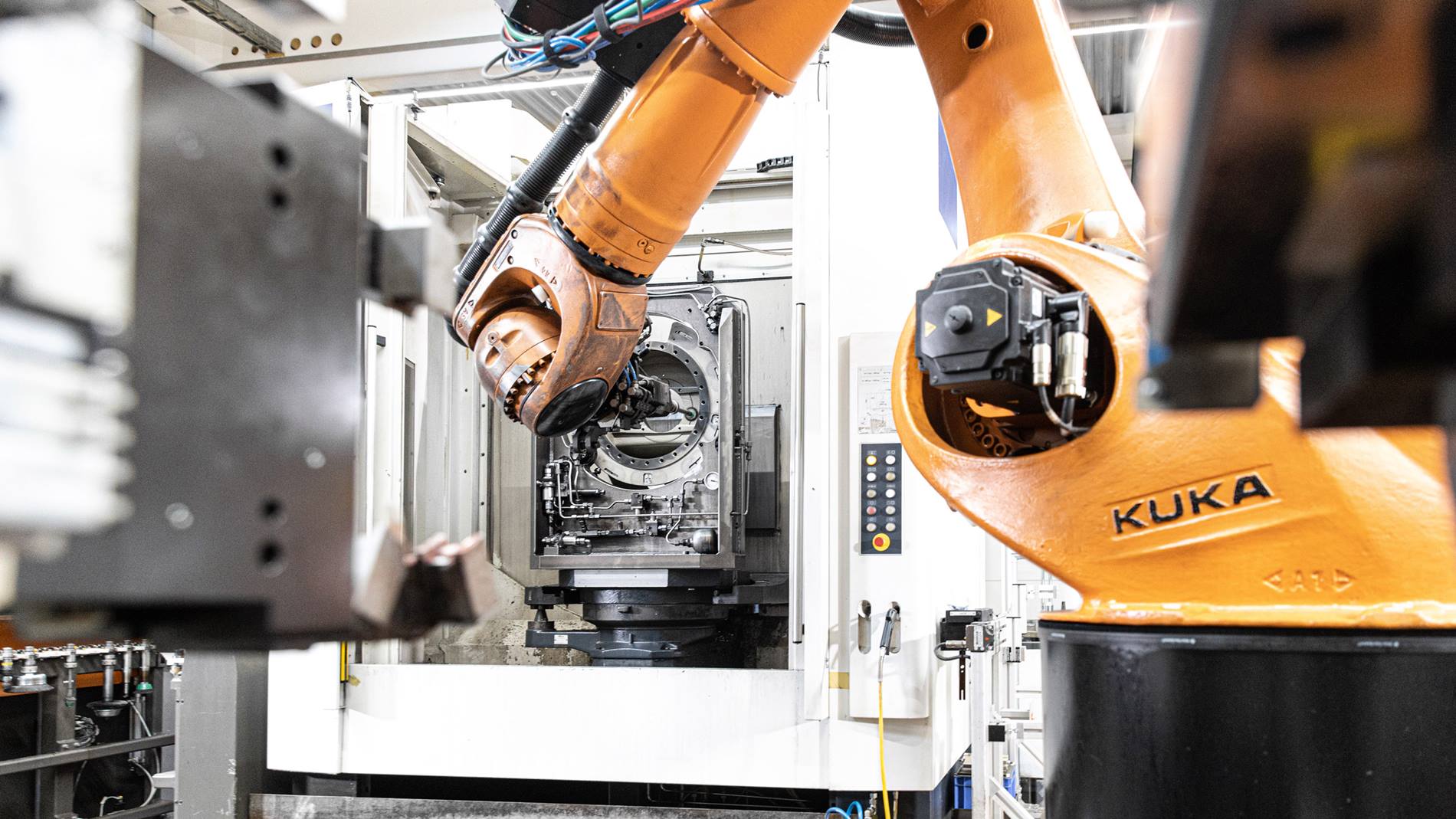
การทำให้เครื่องจักรเครื่องมือเป็นอัตโนมัติ: หุ่นยนต์ KUKA จะทำหน้าที่ในการโหลดและปลดโหลดให้เสร็จสรรพ
ประสิทธิภาพเพิ่มขึ้นด้วยการโหลดและปลดโหลดเครื่องจักรโดยอัตโนมัติ “ในฮอลล์นี้ หุ่นยนต์จะทำส่วนประกอบต่าง ๆ ที่จำเป็นต่อการผลิตหุ่นยนต์ของเรา" Rainer Eder-Spendier ผู้ดูแลระบบอัตโนมัติและหุ่นยนต์กล่าว เหนือสิ่งอื่นใดหุ่นยนต์สับและทำงานบนเฟรมฐานหมุนและแกว่ง ชิ้นส่วนจะถูกประกอบเข้าด้วยกันในขั้นตอนการติดตั้งหุ่นยนต์ เนื่องจากหุ่นยนต์ทำหน้าที่โหลดและปลดโหลดจากเครื่องกลึง การผลิตจึงไม่จำเป็นต้องใช้บุคลากรเยอะและในบางช่วงสามารถทำงานได้โดยไร้บุคลากรคอยควบคุม
เครื่องมือเครื่องจักรหลายประเภทและหุ่นยนต์ทำการกลึงและทำงานร่วมกัน
ยกตัวอย่างเช่น ในหนึ่งเซลล์มีการติดตั้งเครื่องจักรเครื่องมือของผู้ผลิต Grob อยู่สามประเภท ชิ้นงานที่จะทำการกลึงจะถูกจับยึดโดยผู้ปฏิบัติงานในอุปกรณ์จับยึดจากนั้นนำมารวมกับพาเลทและอุปกรณ์ในเซลล์ ถึงจุดนี้ หุ่น KR FORTEC รุ่น KR 600 R2830 จะทำหน้าที่ในการเชื่อมโยงแต่ละขั้นตอน หุ่นยนต์จะขับเคลื่อนเครื่องจักรทั้งสามผ่านหน่วยเชิงเส้นและยังควบคุมการขนย้ายวัสดุจากเครื่องมือกลไปยังเซลล์การปรับปรุง ซึ่งชิ้นส่วนโลหะจะถูกทำเสร็จสิ้นที่นี่ ท้ายที่สุดหุ่นยนต์จะนำชิ้นส่วนที่เสร็จสิ้นกลับมายังพื้นที่ทำงาน การทำงานของ KUKA SafeOperation ทำให้เกิดการเร่งความเร็วขั้นสูงสุดและทำให้ระยะเวลาสั้นในการเปลี่ยนชิ้นส่วนในพื้นที่จำกัดเป็นไปได้
หุ่นยนต์ยังทำหน้าที่ในการโหลดและปลดโหลดของเครื่องจักรเช่นกัน
ในเซลล์อื่น ๆ KR FORTEC รุ่น KR 500 L480-3 MT จะดูแลเรื่อง การโหลดและปลดโหลดของเครื่องจักรทั้งสอง ของผู้ผลิต Heller ดังนั้นหุ่นยนต์จึงถูกติดตั้งในหน่วยเชิงเส้น สถานีฟีดทั้งสี่ทำการลำเลียงวัตถุดิบ หากการทำงานในเครื่องจักรเสร็จสิ้น หุ่นยนต์จะทำการนำชิ้นส่วนออกและทำการขัดชิ้นส่วนบนสถานีติดตั้ง ท้ายสุด หุ่นยนต์จะนำชิ้นส่วนนั้นไปไว้บนโต๊ะหมุน
เช่นเดียวกัน เครื่องจักรยี่ห้อ Burkhardt + Weber จะถูกโหลดและปลดโหลดโดย KR FORTEC รุ่น KR 500 เครื่องจักรจะถูกติดตั้งตัวเปลี่ยนพาเลทคู่: บนพาเลทหนึ่งจะมีอุปกรณ์ปรับแรงตึงสำหรับแขนเหวี่ยง บนพาเลทอีกอันสำหรับการหมุน ระหว่างที่หุ่นยนต์ทำการโหลดพาเลทหนึ่งด้วยชิ้นงาน เครื่องจักรจะดำเนินการกับชิ้นงานที่จับยึดบนพาเลทอื่น
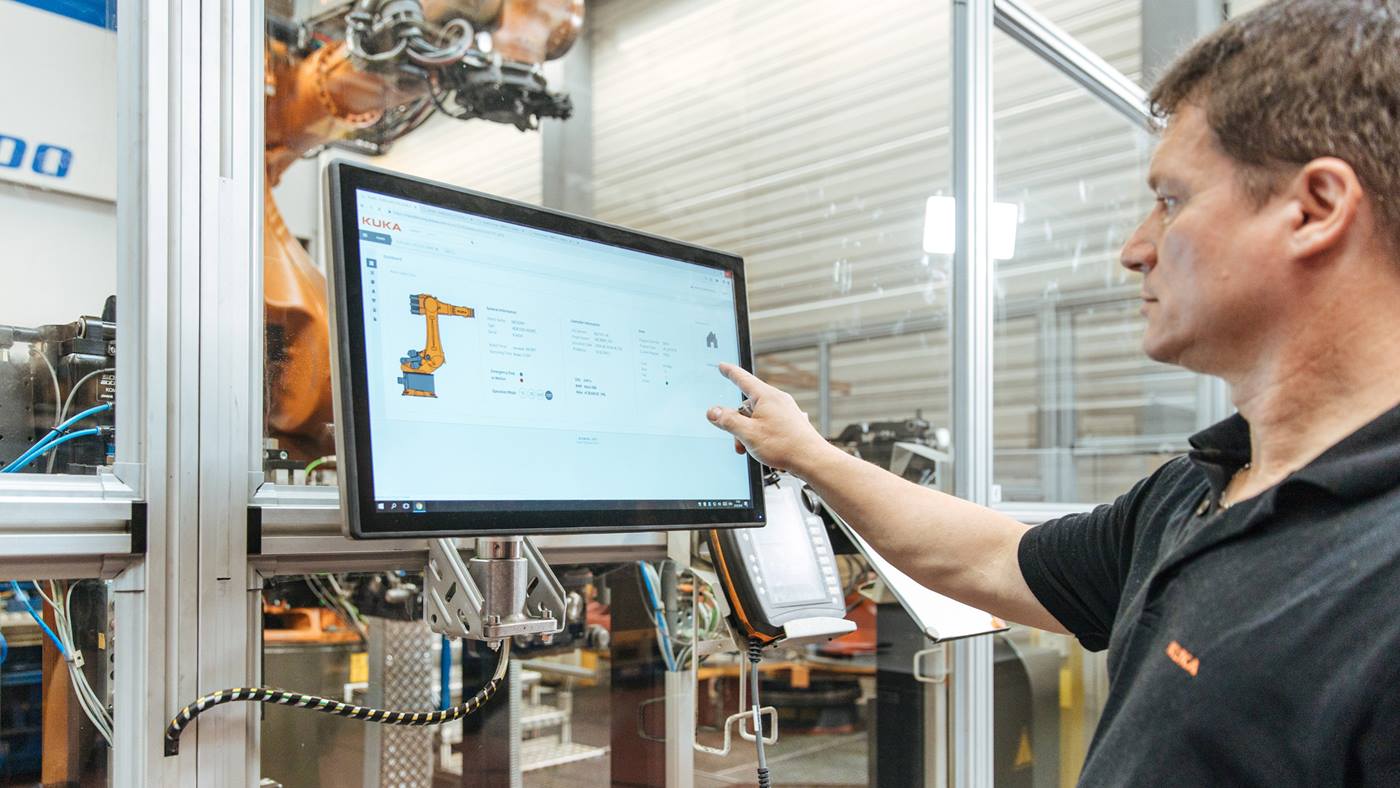
ข้อดีของการทำให้เป็นอัตโนมัติและการเชื่อมโยงของเครื่องมือเครื่องมือ
คล้ายคลึงกับ Smart Watch หุ่นยนต์และเครื่องจักรจะรวบรวมกลุ่มข้อมูลที่มีสีสันและส่งไปยังคลาวด์ ข้อมูลที่รวบรวมได้จากหุ่นยนต์ KUKA สามารถประมวลผลและประเมินผลผ่าน KUKA Connect ได้ ดังนั้นจึงมีภาพรวมที่สมบูรณ์และควบคุมกระบวนการผลิตปัจจุบันเสมอ