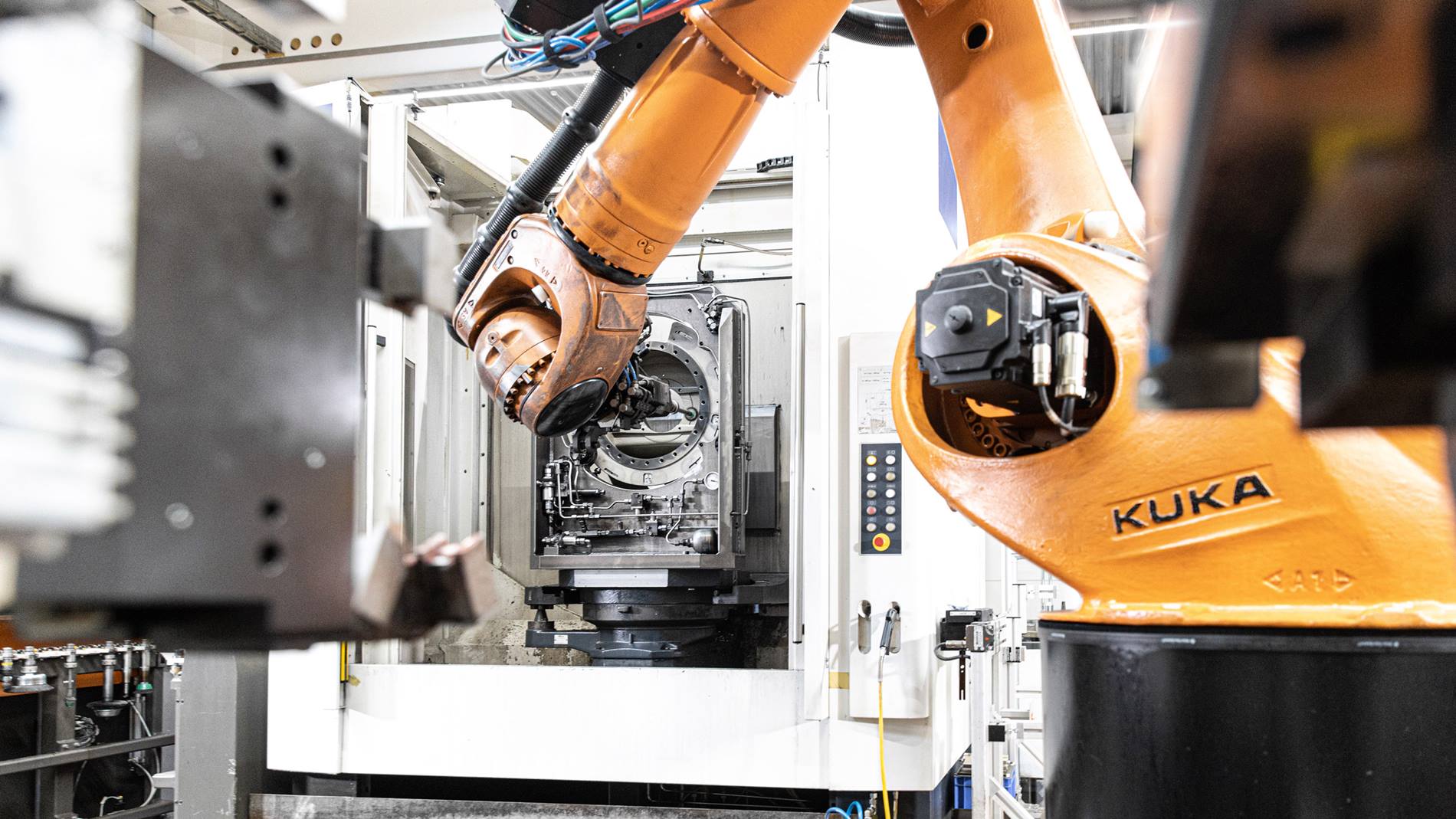
La eficiencia aumenta mediante la carga y descarga automatizadas de máquinas
«En esta nave los robots trabajan en distintos componentes que necesitamos para la fabricación de nuestros robots», resume Eder-Spendier, administrador de automatización y robótica. Los robots mecanizan por arranque de virutas, entre otros, bases, columnas giratorias y brazos de oscilación. Los componentes se ensamblan justo al lado, en el montaje de robots. Gracias a que los robots asumen la carga y descarga de los tornos, la producción se lleva a cabo con poco personal y, durante un período determinado, es posible incluso sin personal.