กระบวนการผลิตที่ใช้หุ่นยนต์ในงานสถาปัตยกรรม
สถาบันเพื่อการออกแบบเชิงคอมพิวเตอร์ และงานก่อสร้างของมหาวิทยาลัยชตุทการ์ด (Institute for Computational Design and Construction) (ICD) ก่อตั้งขึ้นเพื่อวัตถุประสงค์ในการพัฒนากระบวนการเขียนแบบและการก่อสร้างที่ใช้คอมพิวเตอร์เป็นสำคัญ จุดเด่นอยู่ที่วิธีการนำหุ่นยนต์มาใช้งาน สำหรับงานแสดงพืชสวนระดับชาติประจำปี 2019 ณ เมืองไฮล์บรอนน์ทีมงานดูแลโครงการอันประกอบไปด้วย ศาสตราจารย์ Achim Menges และเจ้าหน้าที่ฝ่ายวิชาการอย่าง Christoph Zechmeister Serban Bodea และ Niccolo Dambrosio ได้เขียนแบบอาคารพาวิลเลี่ยน ซึ่งมีโครงสร้างประกอบด้วยส่วนประกอบจากไฟเบอร์ที่ถูกห่อหุ้มไว้ กระบวนการผลิตที่ใช้หุ่นยนต์สำหรับส่วนประกอบโครงสร้างน้ำหนักเบาเป็นจริงขึ้นมาได้ด้วยความช่วยเหลือจากผลิตภัณฑ์ของ KUKA สองรุ่น กล่าวคือ หุ่นยนต์ของ KUKA รุ่น KR 210 R3100 QUANTEC พันเกลียวเส้นใยไว้รอบโครงสำหรับการพันสองส่วนที่ถูกยึดติดกับหุ่นยนต์กำหนดตำแหน่งอย่าง KP1-HC บริษัทผู้รับเหมาก่อสร้างโรงงาน BEC GmbH ได้ผสานรวมหุ่นยนต์ไว้ที่ ICD
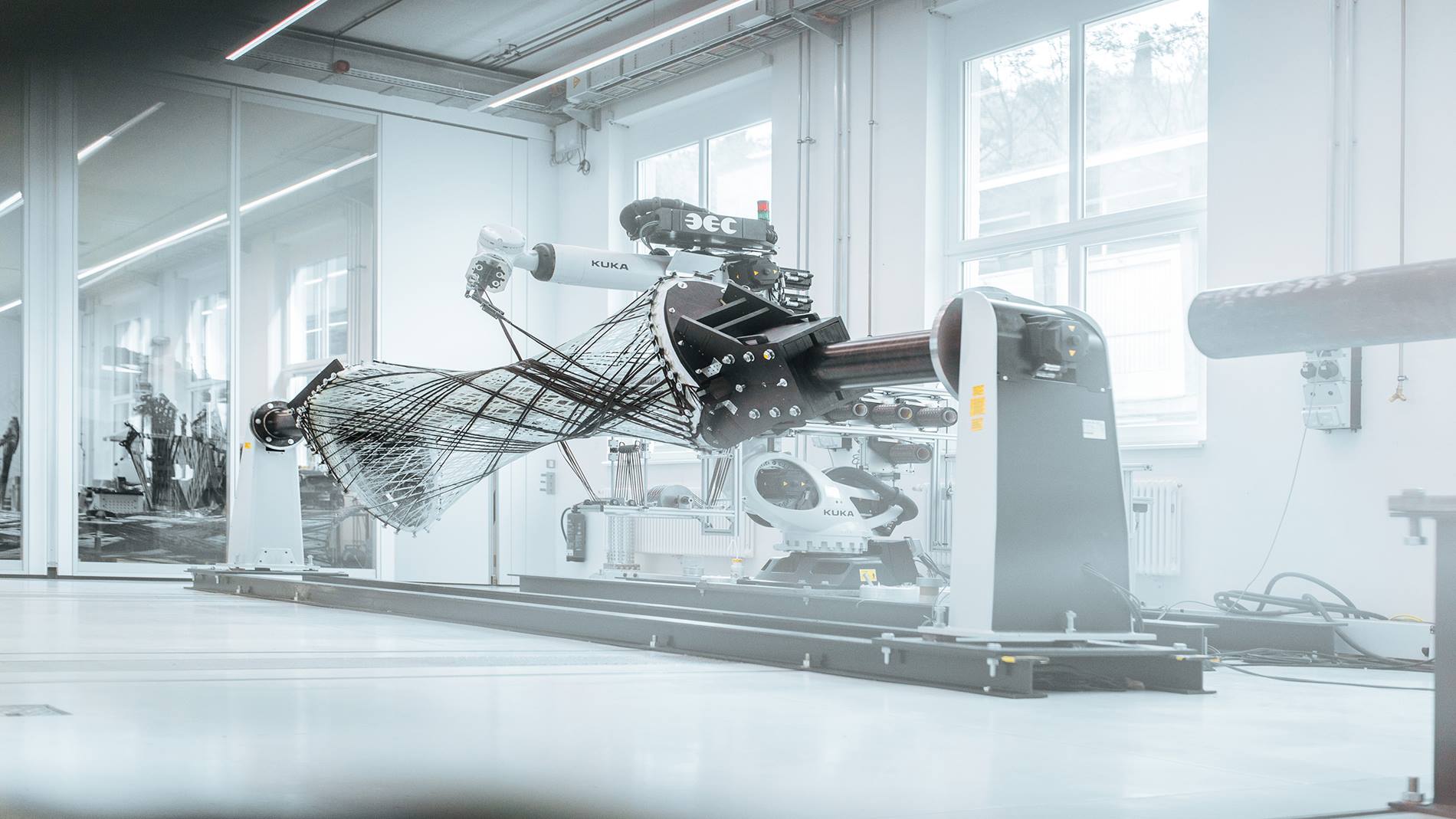
 พันเข้าด้วยกันเป็นอย่างดี: มองเห็นโครงสร้างที่ซับซ้อนของอาคารพาวิลเลี่ยนได้อย่างชัดเจนในระยะประชิด
พันเข้าด้วยกันเป็นอย่างดี: มองเห็นโครงสร้างที่ซับซ้อนของอาคารพาวิลเลี่ยนได้อย่างชัดเจนในระยะประชิด
โซลูชั่นใหม่สำหรับงานสถาปัตยกรรมที่ล้ำสมัยด้วยการใช้หุ่นยนต์
อาคารพาวิลเลี่ยนประกอบด้วยส่วนประกอบโครงสร้าง 60 ชิ้นที่มีขนาดถึง 6 เมตร ความพิเศษในกระบวนการผลิตที่ใช้หุ่นยนต์ องค์ประกอบต่าง ๆ ไม่มีแกนสำหรับพักเส้นใยไฟเบอร์แม้ว่าจะมีขนาดใหญ่ “โครงสร้างรองรับน้ำหนักประกอบด้วยส่วนประกอบโครงสร้างวัสดุผสมที่เสริมแรงด้วยเส้นใย ซึ่งเกิดจากการพันเส้นใยแก้วและคาร์บอนไฟเบอร์อย่างต่อเนื่องโดยหุ่นยนต์ก่อสร้าง” Christoph Zechmeister ชี้แจง บริษัท FibR GmbH เป็นผู้ผลิตส่วนประกอบต่าง ๆ “โครงสร้างดังกล่าวมีความซับซ้อน ซึ่งมีเพียงกระบวนการผลิตที่ใช้หุ่นยนต์ที่จะช่วยให้เกิดขึ้นจริงได้” Moritz Dörstelmann ผู้ถือหุ้นฝ่ายบริหารกล่าว บริษัท FibR GmbH จึงมีความเชี่ยวชาญเป็นพิเศษในการผลิตโครงสร้างวัสดุผสมที่เสริมแรงด้วยเส้นใยสมรรถนะสูงขึ้นได้จริงโดยอาศัยเทคโนโลยีการเขียนแบบและการผลิตระบบดิจิทัล
กระบวนการผลิตที่ใช้หุ่นยนต์สำหรับการผลิตส่วนประกอบที่ล้ำสมัย
บริษัท FibR GmbH มีกระบวนการผลิตที่ใช้หุ่นยนต์สำหรับการผลิตส่วนประกอบโครงสร้าง โครงสำหรับการพันสองส่วนถูกยึดติดกับหุ่นยนต์กำหนดตำแหน่งของ KUKA สองตัวรุ่น KP1-HC หุ่นยนต์กำหนดตำแหน่งทั้งสองถูกเชื่อมต่อเข้าด้วยกันในรูปแบบการเคลื่อนไหวทางคิเนเมติกส์โดยอาศัยท่อเหล็กหนึ่งท่อ แกนแนวราบที่เกิดขึ้นจึงหมุนได้ไม่มีที่สิ้นสุดและช่วยให้โครงสำหรับพันสามารถเคลื่อนไหวได้พร้อมกัน การเคลื่อนไหวอย่างอิสระจำเป็นสำหรับกระบวนการผลิตที่ใช้หุ่นยนต์ จึงรับประกันความสามารถในการเข้าถึงปลายแขนกล (End Effector) ของหุ่นยนต์ KR QUANTEC ได้อย่างเหมาะสม คอยล์ไฟเบอร์ยึดติดกับแขนของหุ่นยนต์ก่อสร้าง เกลียวเส้นใยจะถูกชุบด้วยสารเคมีเป็นอันดับแรกก่อนที่จะผ่านการรักษาระดับแรงดันและถูกนำไปยังปลายแขนกล จากนั้น แขนกลจะวางเกลียวดังกล่าวไว้รอบจุดเกลียวล็อกของโครงสำหรับพัน
ข้อดีของหุ่นยนต์ในอุตสาหกรรมก่อสร้าง
เนื่องจากหุ่นยนต์ก่อสร้างมีความแม่นยำและความแน่นอนในการทำซ้ำ จึงสามารถปรับส่วนประกอบโครงสร้างให้เหมาะสมเฉพาะแต่ละงานได้ “เส้นทางการผลิตสำหรับองค์ประกอบ 60 ชิ้นจะถูกสร้างโดยจากแบบจำลองดิจิทัลโดยตรง” Christoph Zechmeister กล่าว มีการนำ Engineering Suite KUKA.WorkVisual มาใช้ในการกำหนดค่าแอปพลิเคชั่น ในกระบวนการผลิตที่ใช้หุ่นยนต์ โครงสร้างวัสดุผสมที่เสริมแรงด้วยเส้นใยช่วงยาวจะได้รับการผลิตขึ้นด้วยต้นทุนประสิทธิผลและประหยัดวัสดุ ศักยภาพของหุ่นยนต์ก่อสร้างอยู่ที่ความยืดหยุ่นและความสามารถในการปรับขนาดได้ในการตั้งค่าการผลิตรวมไปถึงคุณภาพสูงของส่วนประกอบโครงสร้าง “กระบวนการผลิตที่ใช้หุ่นยนต์ไม่เพียงช่วยลดการสิ้นเปลืองทรัพยากรในอุตสาหกรรมก่อสร้าง แต่ยังทำให้โครงการด้านสถาปัตยกรรมใหม่ที่น่าตื่นตาตื่นใจเกิดขึ้นได้จริงอีกด้วย” Moritz Dörstelmann กล่าว
 หุ่นยนต์ในงานสถาปัตยกรรมทำให้รูปแบบใหม่ของส่วนประกอบโครงเป็นจริงได้
หุ่นยนต์ในงานสถาปัตยกรรมทำให้รูปแบบใหม่ของส่วนประกอบโครงเป็นจริงได้