Vi tar ledproteskirurgi till 2000-talet med ett bättre robotsystem
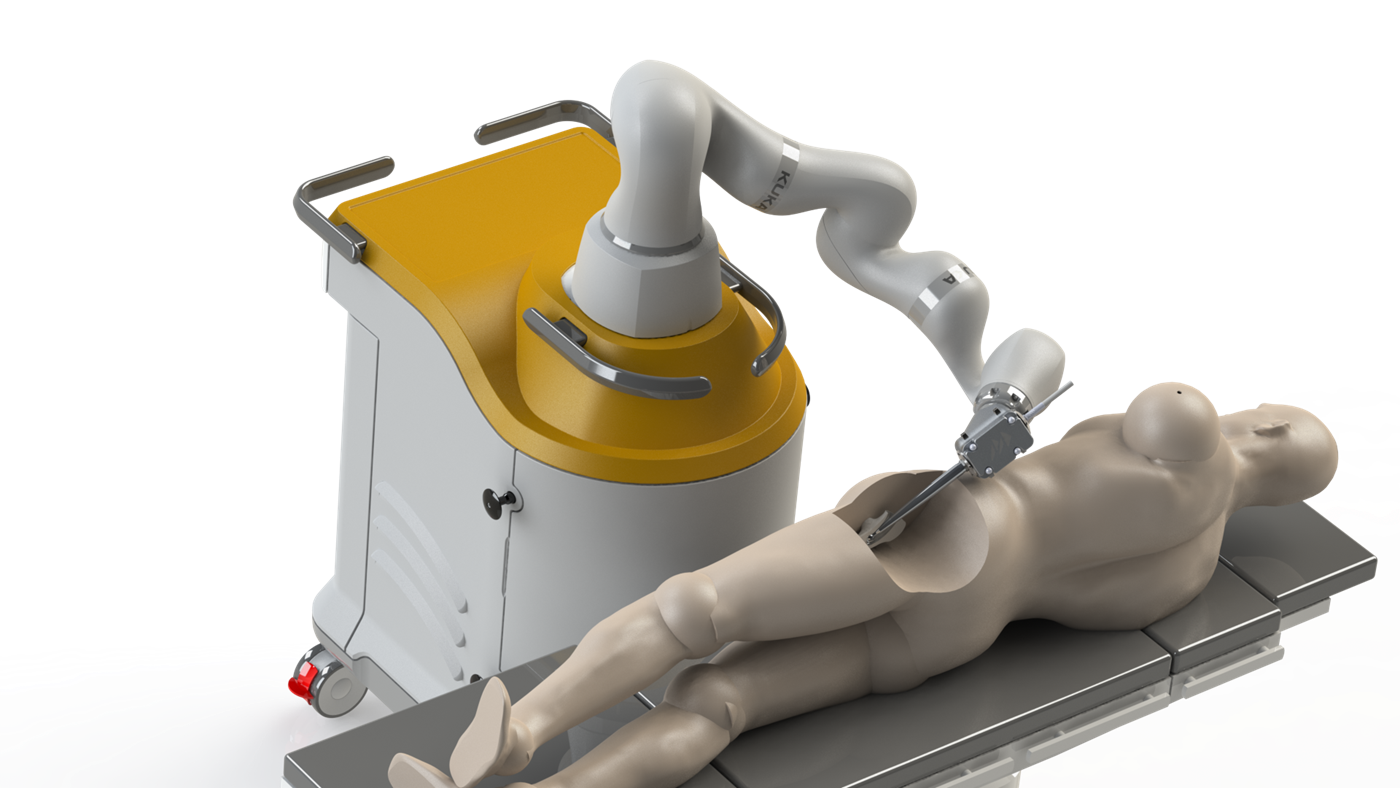
Arbetsflödet som Monogram-robotsystemet följer är patientcentrerat från början till slut. Först genomförs en datortomografi. Sedan använder företaget, som är baserat i Texas, sin egna programvara för att autogenerera en patientanpassad protes. Den 3D-printas för att exakt matcha patientens anatomi. Baserat på den datortomografiska bilden skapas en preoperativ plan som KUKA-roboten LBR Med använder för att exakt fräsa ut den printade protesens egenskaper. Kirurgen sätter sedan in det ortopediska implantatet i den kavitet på patienten som ovan nämnda lättviktsrobot har fräst ur med hög precision. Denna kombination eliminerar en stor del av den variabilitet hos de kirurgiska resultaten som leder till nya läkarbesök och missnöje.