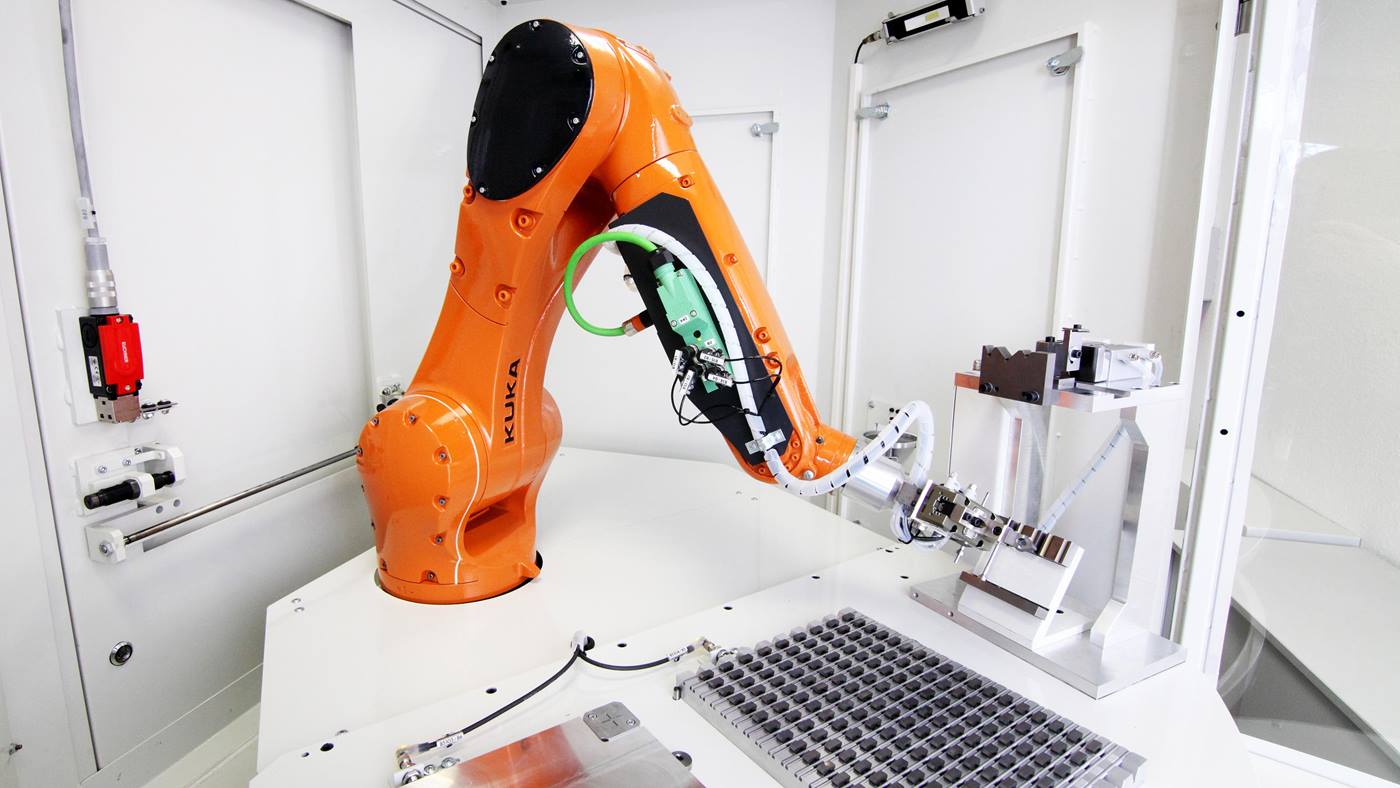

Matning och hämtning av arbetsstyckena med två gripare
Den sexaxliga KUKA KR 6 R900 sixx WP hämtar det arbetsstycke som ska bearbetas från en pall i robotcellen, t.ex. ett vändskär eller ett skaftverktyg. Vändskär placeras på ett stift. Därefter placeras arbetsstycke framför celldörren som öppnas automatiskt.
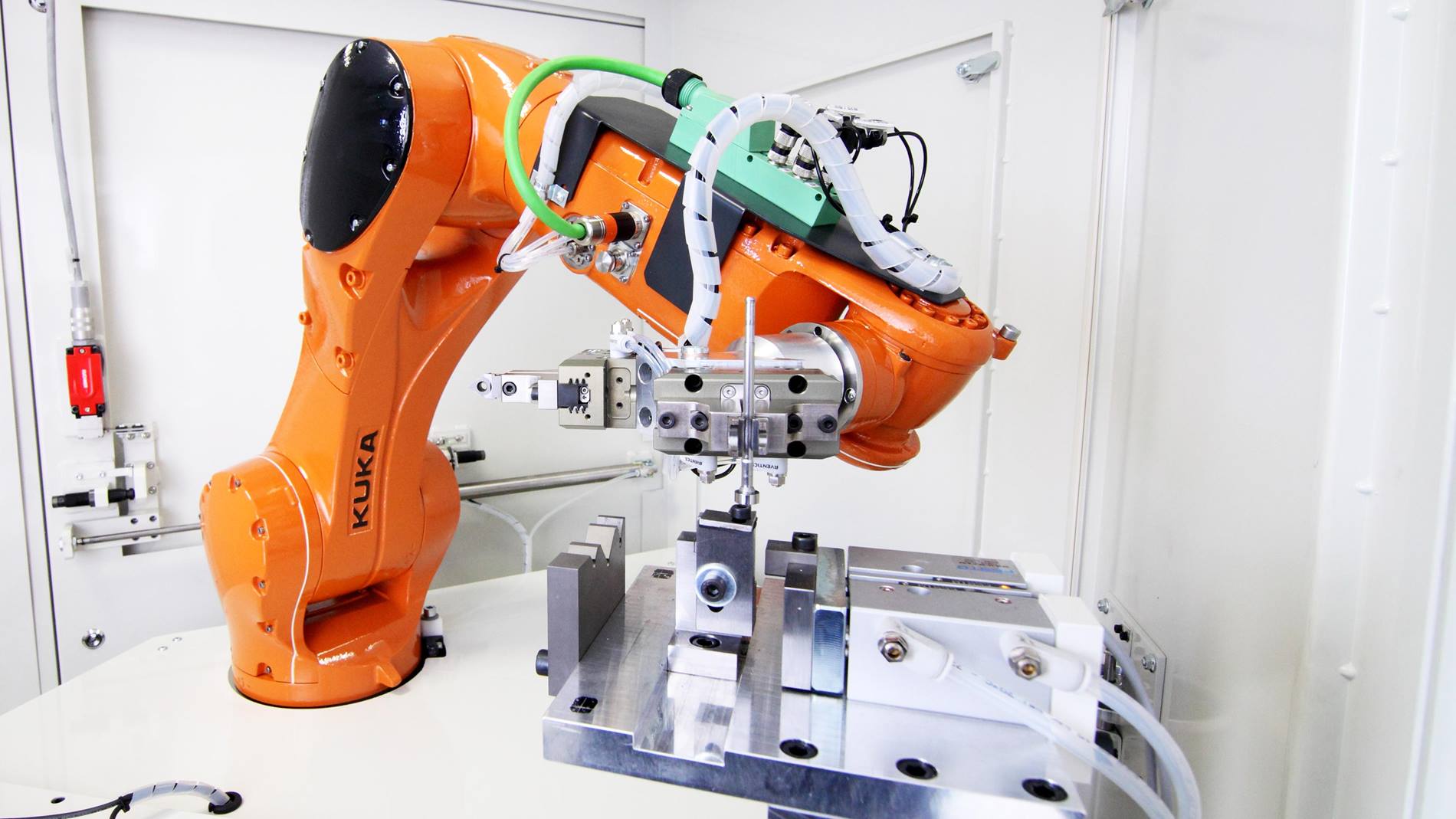
Robotarmen kör sedan genom dörren till en slipmaskin som befinner sig utanför robotcellen där det under pågående drift redan finns ett bearbetat arbetsstycke. Roboten hämtar detta arbetsstycke med den andra griparen och matar samtidigt in det nya arbetsstycket med en snabb vridning på griparmen.
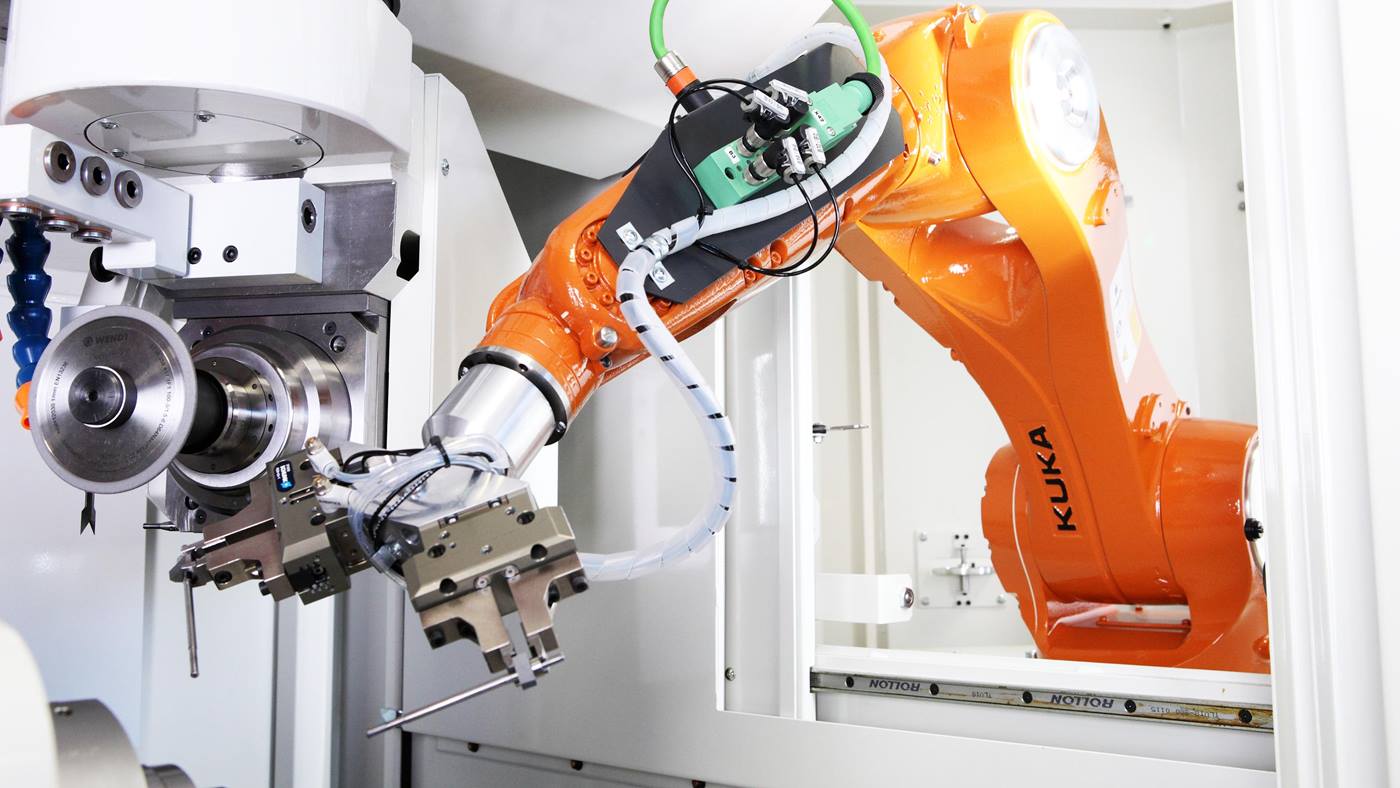
Därefter påbörjar verktygsslipmaskinen UW I F bearbetningen av det nya arbetsstycket. Under tiden kör robotarmen tillbaka till robotcellen. Det redan bearbetade arbetsstycket rengörs i blåsstationen och läggs tillbaka på pallen innan roboten hämtar nästa arbetsstycke som ska slipas och förloppet börjar om.