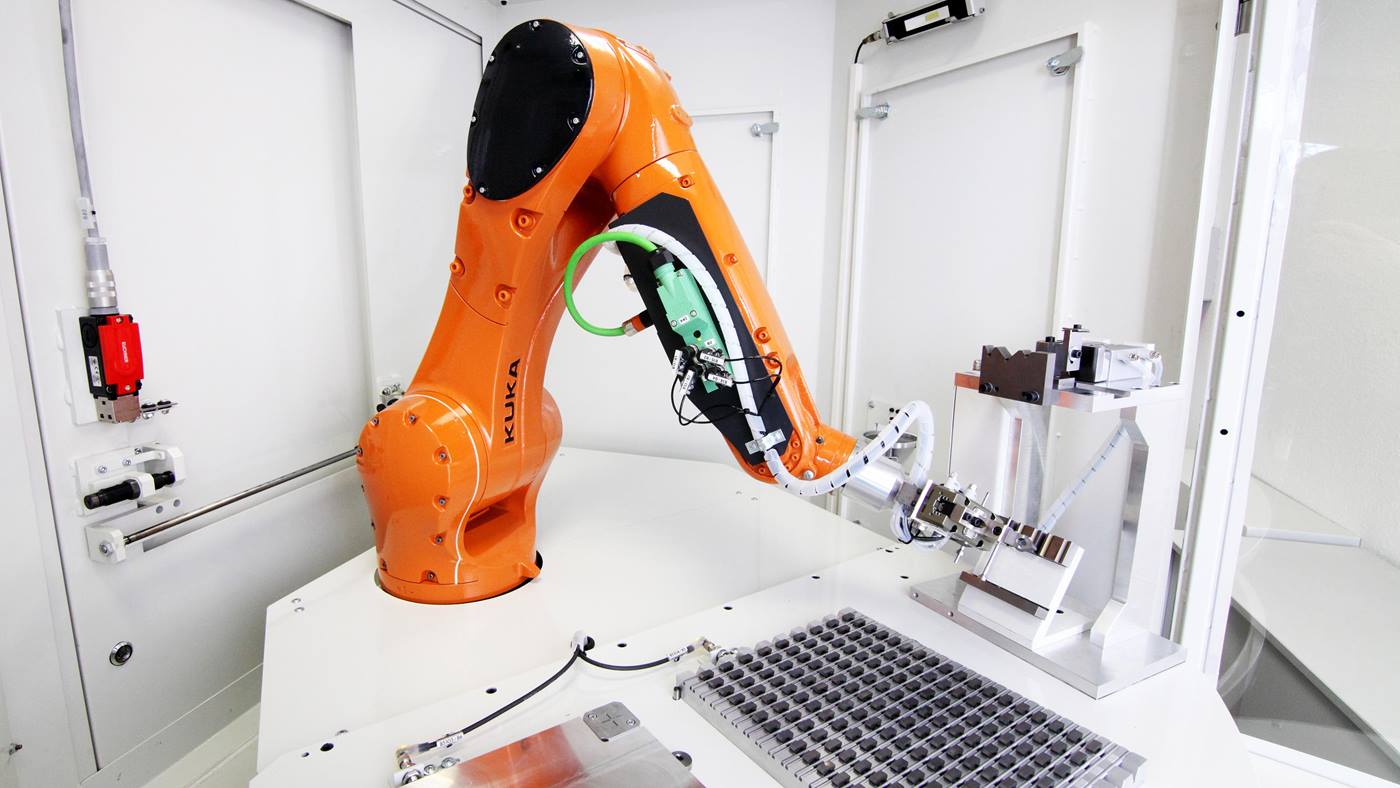

Alimentación y retirada de las piezas con dos garras
En la celda robot, el KUKA KR 6 R900 sixx WP retira de un palé la pieza a mecanizar, por ejemplo una placa giratoria o una fresa frontal. Las placas giratorias se colocan sobre un pin. A continuación, coloca la pieza delante de la puerta de la celda y esta se abre automáticamente.
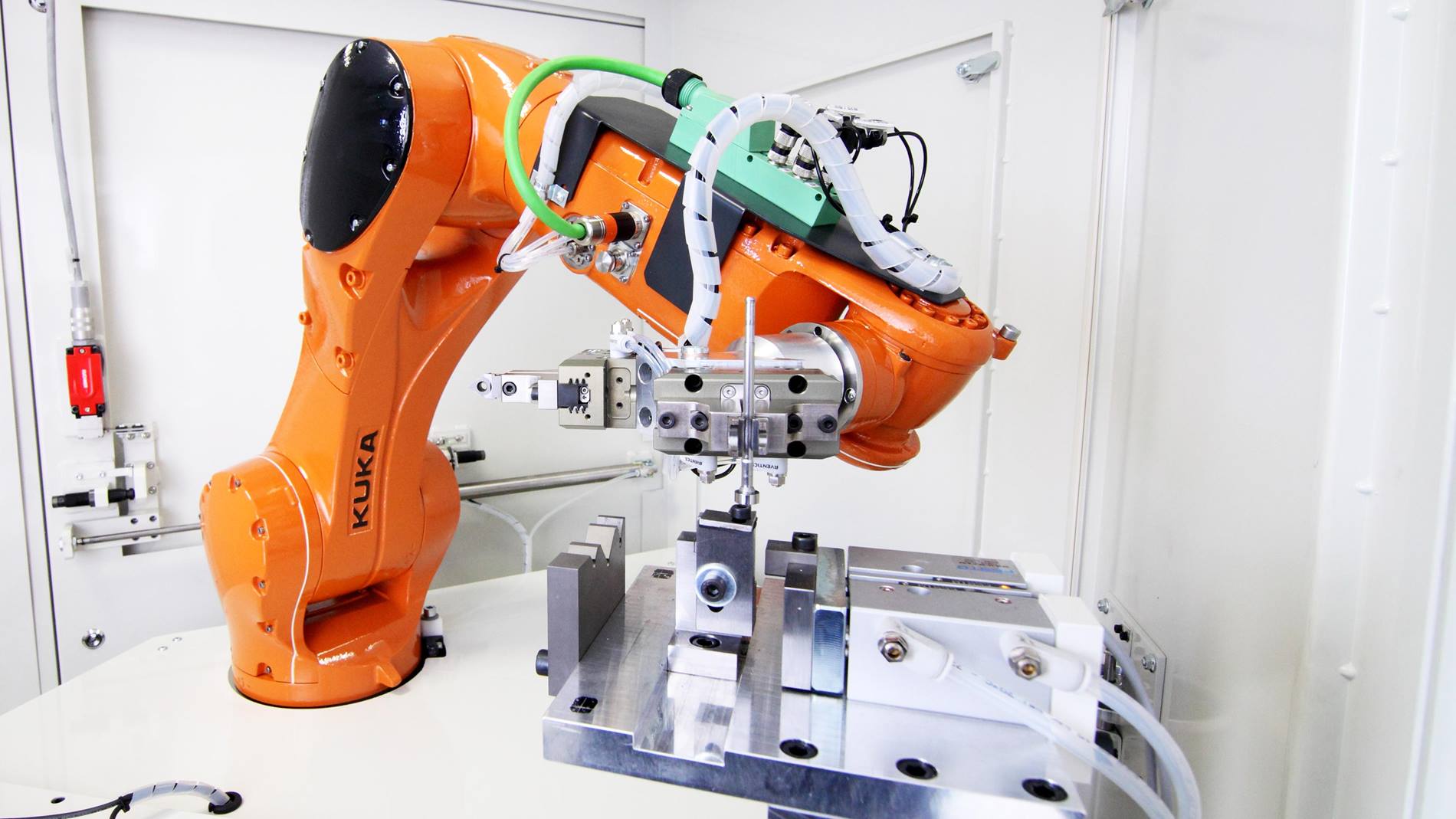
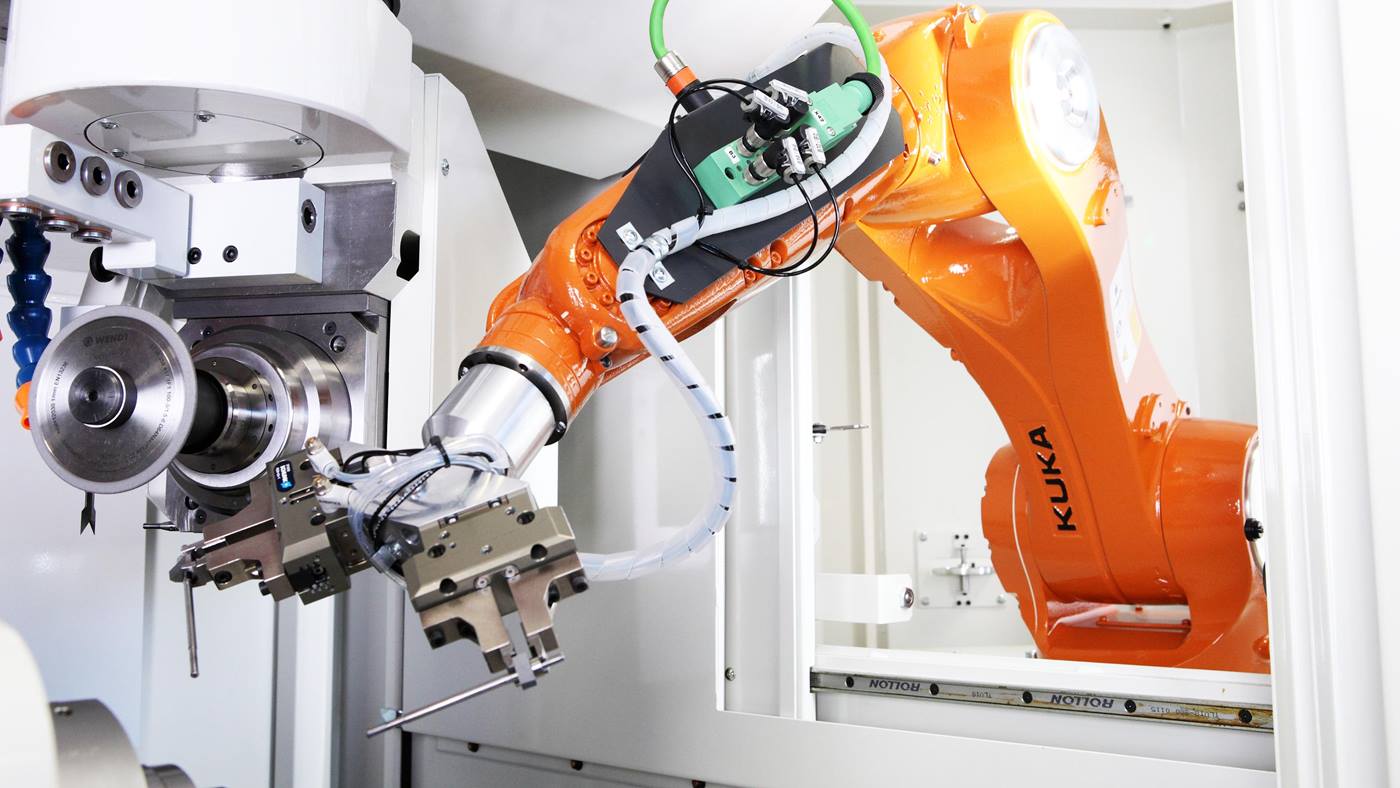
El brazo del robot pasa a través de las puertas abiertas hasta la máquina afiladora, situada fuera de la celda del robot, en la que se encuentra una pieza ya mecanizada durante el servicio. El robot utiliza su segunda garra para coger esa pieza y, con un giro rápido del brazo de garra, insertar después la pieza nueva.
A continuación se inicia el mecanizado de la nueva pieza en la máquina afiladora de herramientas UW I F. Mientras tanto, el brazo del robot retorna a la celda del robot. Aquí, la pieza mecanizada se limpia en la estación de descarga y se vuelve a colocar en el palé antes de que el robot recoja la siguiente pieza a mecanizar y se vuelva a comenzar el proceso desde el principio.