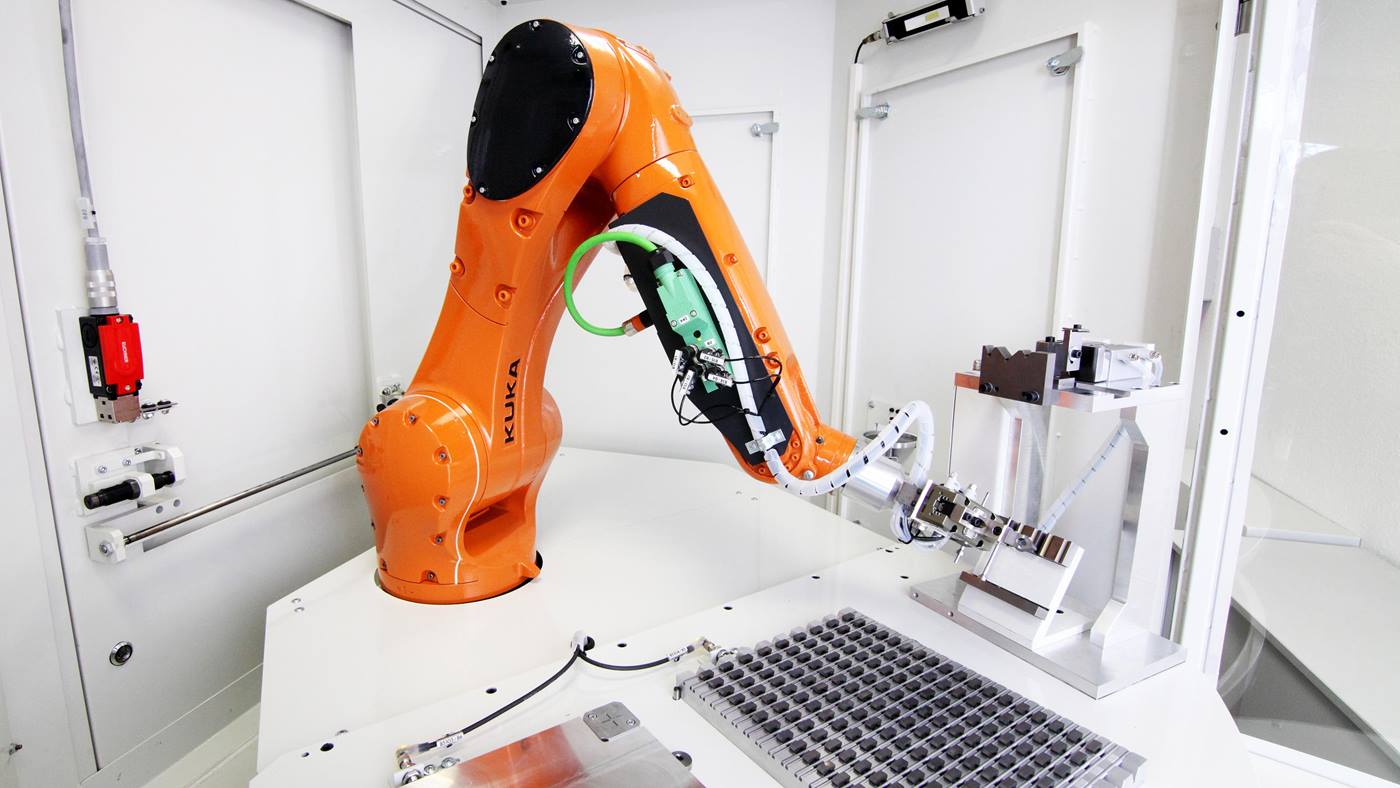

İki tutucuyla iş parçalarını bağlama ve boşaltma
Altı eksenli KUKA KR 6 R900 sixx WP işlenecek iş parçasını, örneğin indekslenebilir bir ek parça veya mil takımı, robot hücresindeki paletten çıkarır. İndekslenebilir ek parçalar bir pim üzerine monte edilir. Bunu takiben iş parçasını, daha sonra otomatik olarak açılacak hücre kapısının önüne konumlandırır.
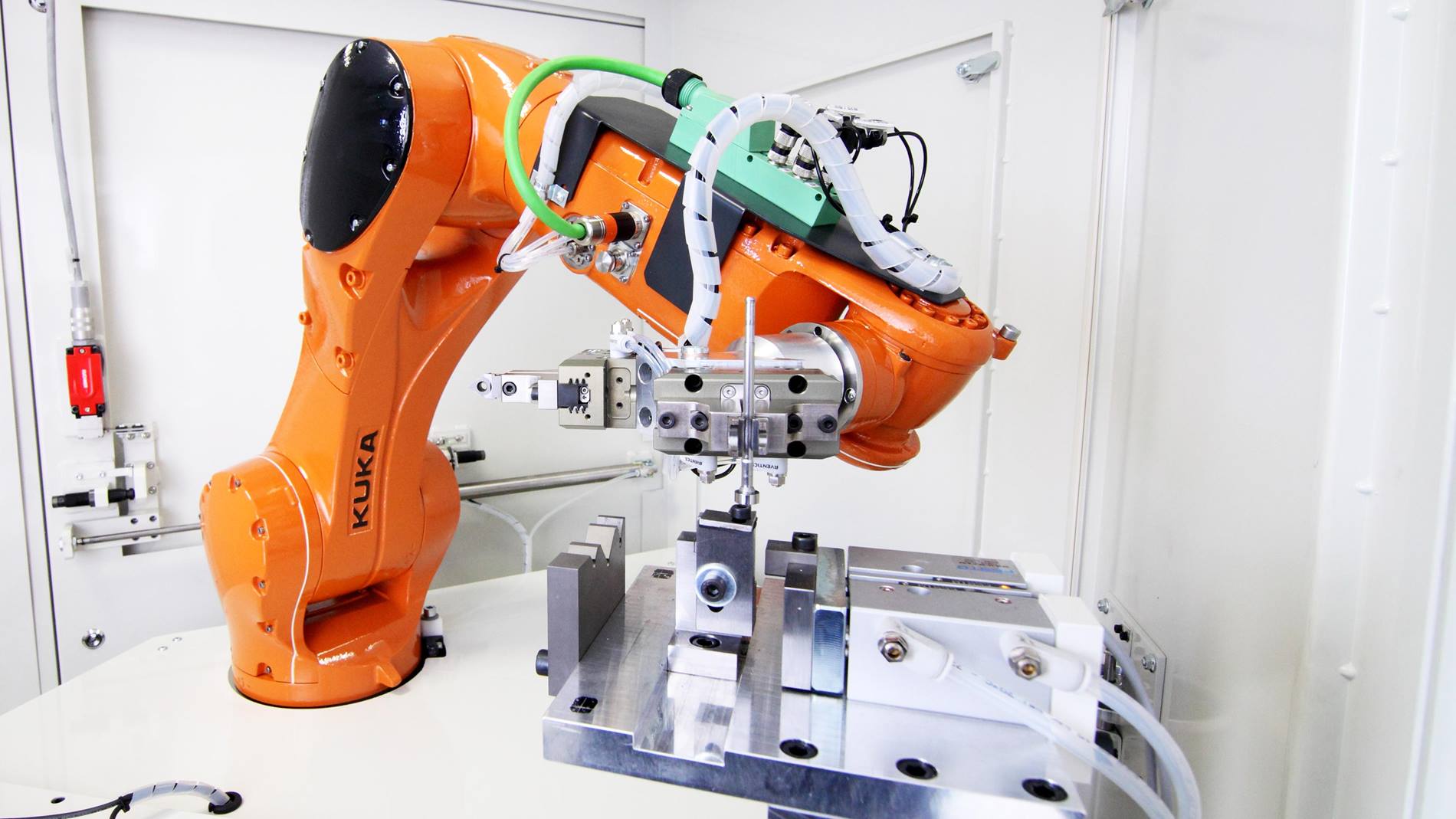
Robot kolu açılmış kapıdan geçerek hücre dışına, devam eden işletim sırasında önceden işlenmiş bir aletin bulunduğu bileme cihazına doğru hareket eder. İkinci tutucu ile robot bu iş parçasını alır ve ardından tutucu kolun hızlı bir dönüşü ile yeni iş parçasını yerleştirir.
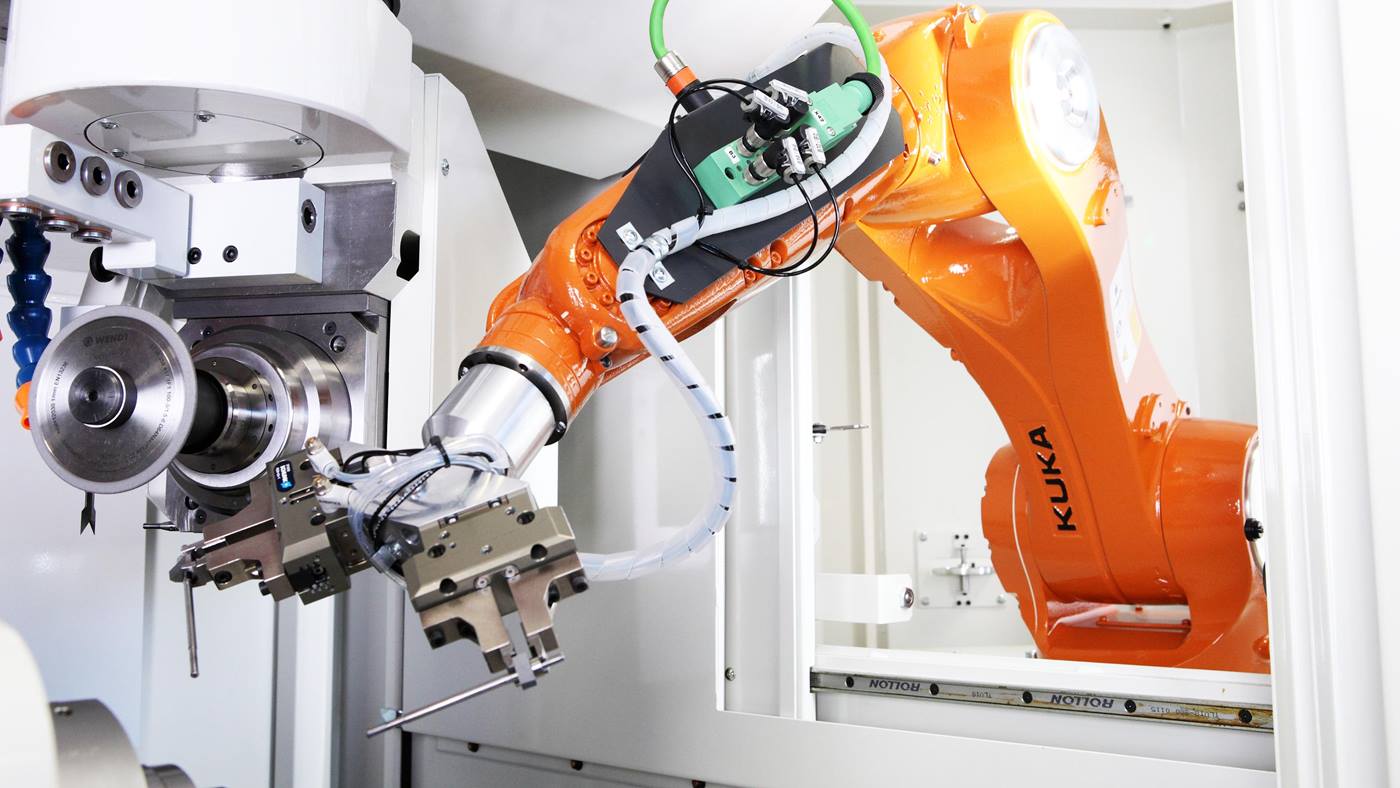
Yeni iş parçasının UW I F takım bileme makinesi tarafından işlenmesi başlar. Bu arada robot kolu robot hücresine geri döner. Burada, işlenen iş parçası hava üfleyerek temizleme istasyonunda temizlenir ve robot bir sonraki işlenecek parçayı almadan ve iş süreci yeniden başlamadan önce tekrar palete bırakılır.