


Vägen leder framåt för robotassisterad rotationsosteotomi för höftleder
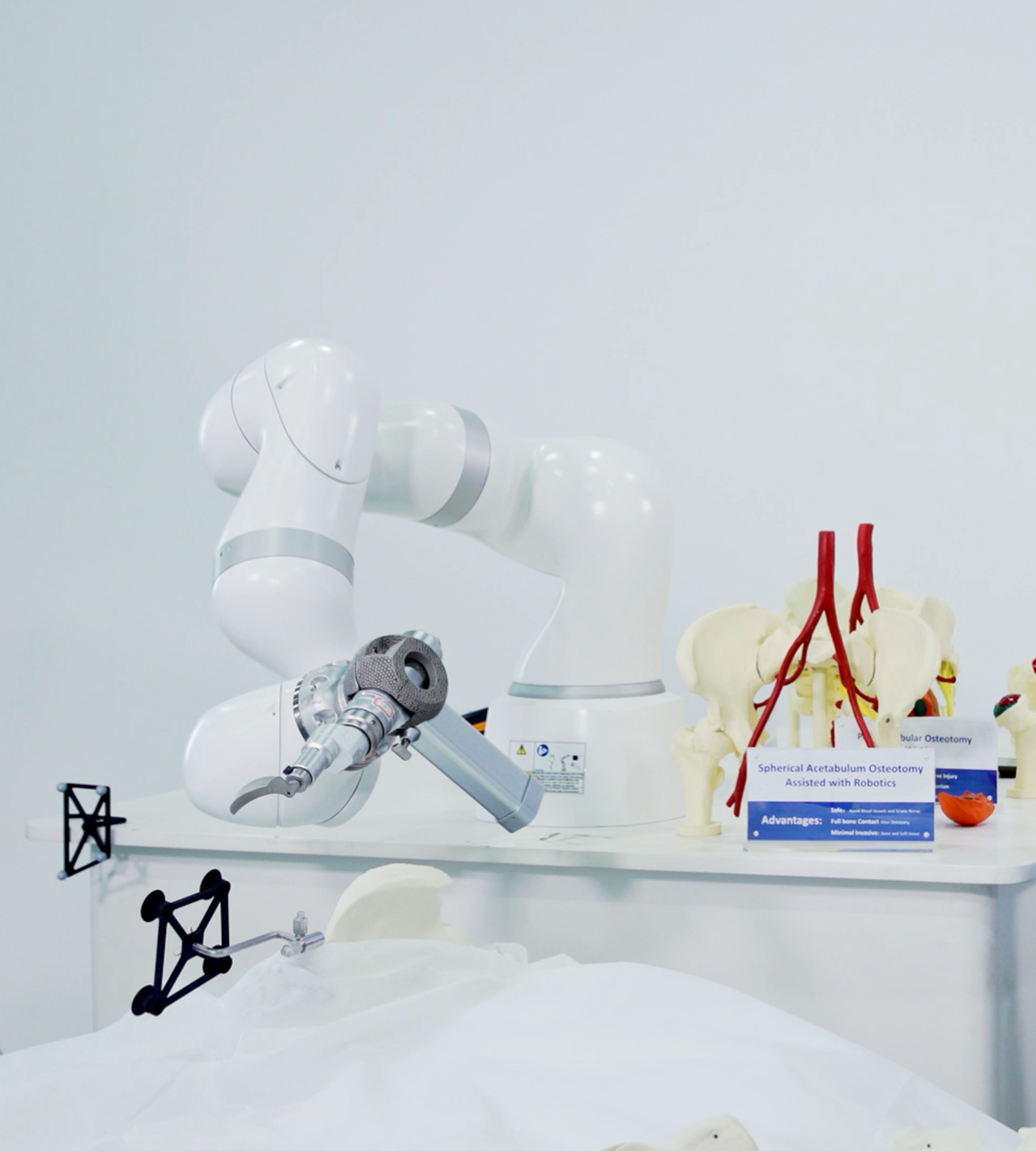
Shanghai Sixth People’s Hospital har producerat den första prototypen för kulledsosteotomi i Kina. De kommer att förlita sig på och stödjas av resurserna för forskning och utveckling, produktion och marknadsföring från Shanghai Electric Group för att förbättra och optimera systemet, klara olika tester inom branschen och slutligen göra entré på marknaden.
De hoppas att deras produkter kommer att marknadsföras över hela världen och hjälpa världens alla människor samt underlätta läkarnas arbete.
De hoppas att deras produkter kommer att marknadsföras över hela världen och hjälpa världens alla människor samt underlätta läkarnas arbete.
