


Vers un avenir meilleur grâce à l’ostéotomie de rotation assistée par robot
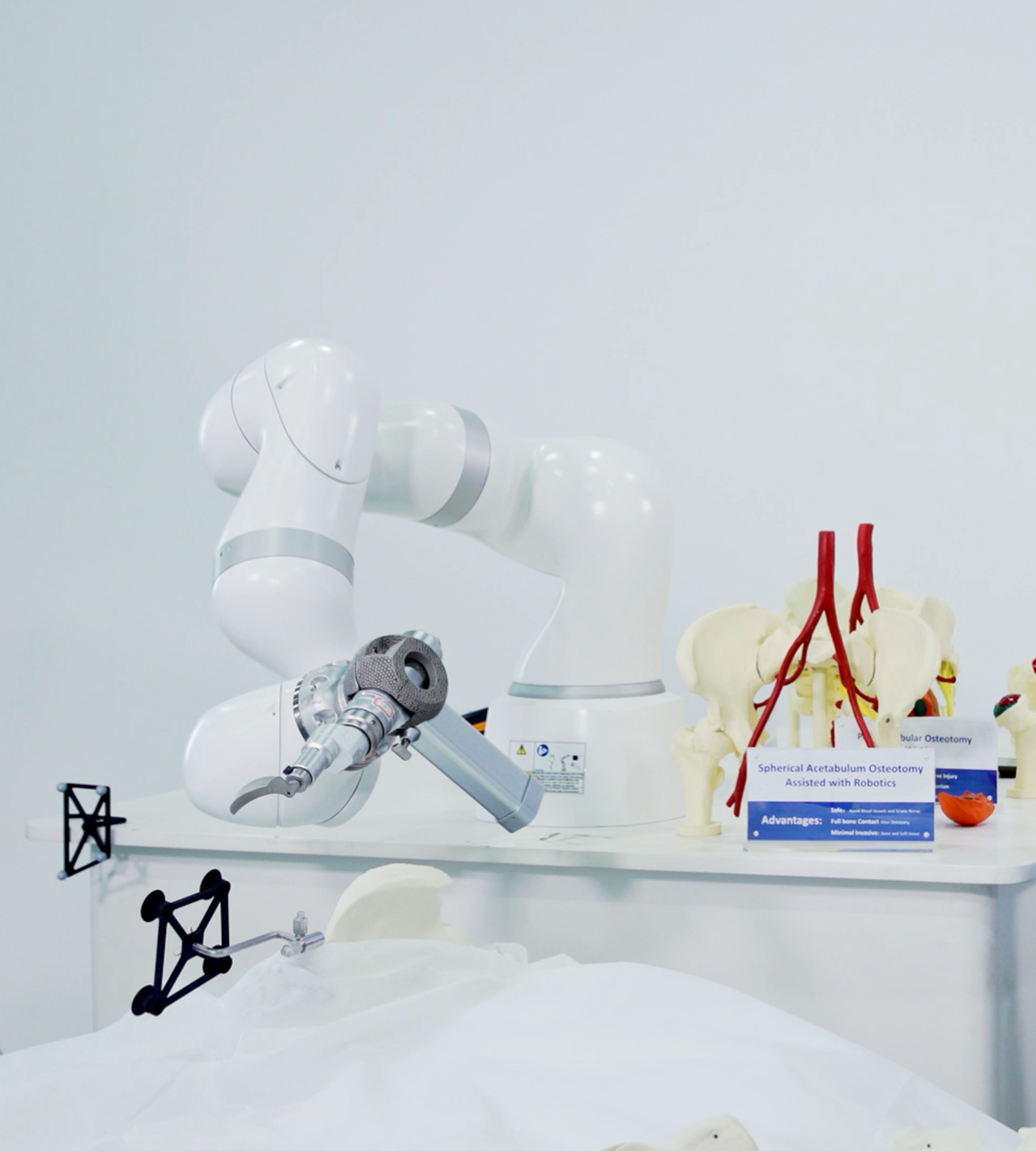
Le Shanghai Sixth People’s Hospital a produit le premier prototype d’appareil d’ostéotomie sphérique en Chine. L’équipe pourra s’appuyer sur les ressources de R&D, de production et de marketing du Shanghai Electric Group pour améliorer et ajuster le système, réaliser différents tests en milieu industriel et finalement le commercialiser.
Elle espère que ses produits seront promus dans le monde entier pour le plus grand bien des patients et des médecins.
Elle espère que ses produits seront promus dans le monde entier pour le plus grand bien des patients et des médecins.
