期盼走向機器人輔助髖臼旋轉截骨手術的未來
上海市第六人民醫院已生產出中國第一個球形截骨術裝置原型。上海電氣集團的研發、製造及行銷資源將對此提供協助與支援,以便改進與微調系統、通過業界多項測試,最後上市販售。
他們希望將產品推廣到全世界,造福全球各地的民眾,並讓機器人成為醫生的好幫手。
他們希望將產品推廣到全世界,造福全球各地的民眾,並讓機器人成為醫生的好幫手。
您使用的是舊版 Internet Explorers 流覽器。
請更新您的流覽器以便獲得最佳顯示效果

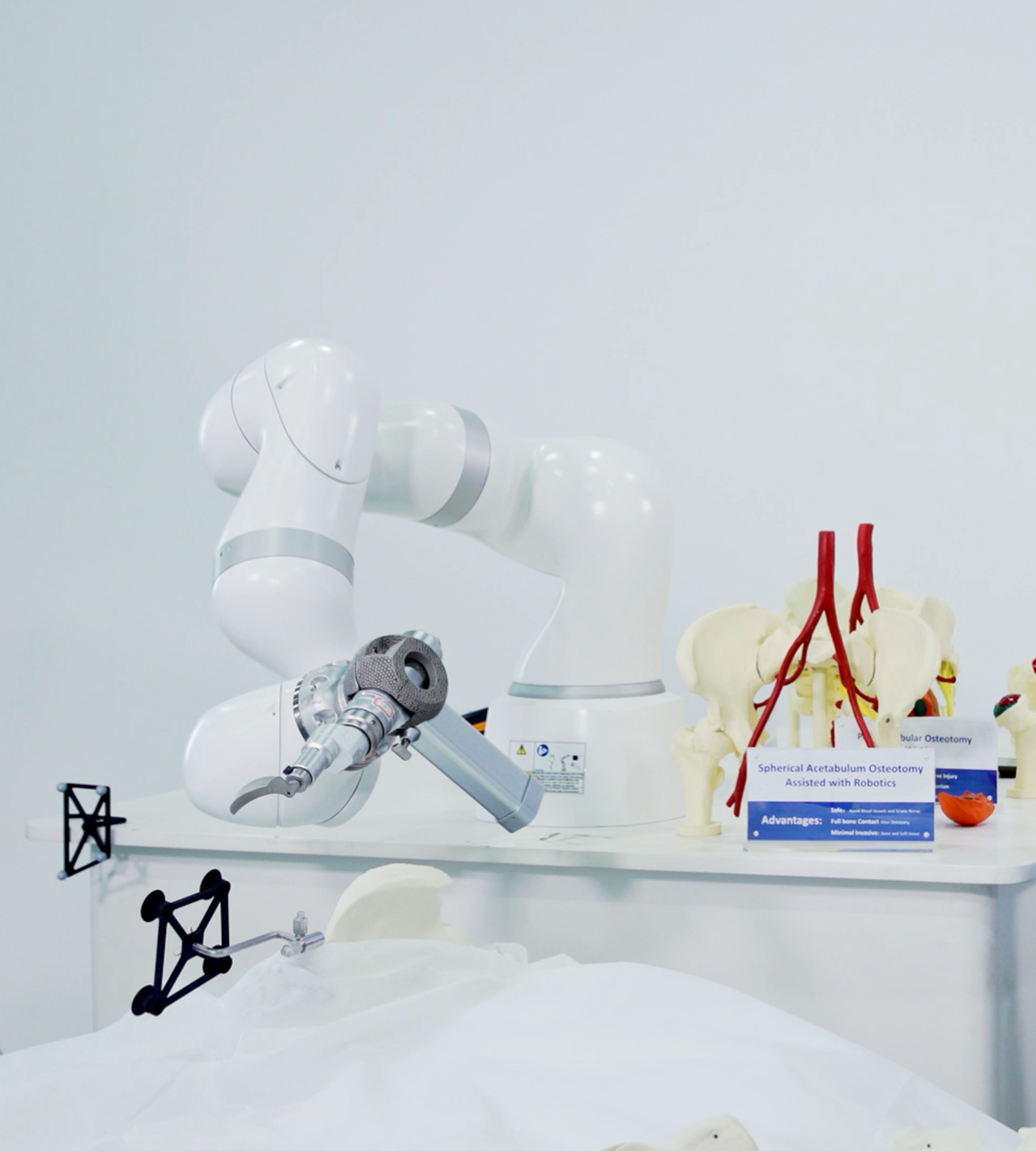
上海電氣集團公司中央研究院與上海市第六人民醫院攜手開發出 SpheriObot,這是世界上第一個採用 LBR Med 的機器人系統,可用於旋轉截骨手術。其理論與演算法、控制機制和實施方式可套用至骨外科手術所需的所有截骨手術,例如因畸形所需的切骨術,或因股骨與脛骨退化性病變所需的高位截骨術。
先天性髖關節發育不良是一種會造成兒童、青少年及成人疼痛、行走困難、嚴重畸形甚至失能的病症。醫師愈來愈傾向於選擇執行髖關節保留術,而非人工關節置換術,因為後者常造成病患的餘生可能需接受多次人工關節翻修手術。髖關節保留術的常見臨床程序是由瑞士的 Reinhold Ganz 博士發明的髖⾅周圍截骨術:在髖臼周圍進行多邊截骨術,使髖臼從周邊骨盆脫離。調整髖臼的角度,藉此增加股骨頭涵蓋範圍,即可改善症狀。
但是,採用 Ganz 博士的方法也附帶嚴重的風險:
其一:不容易重新排列骨碎片,且可能導致骨盆不穩定;其二:切口視野大,可能導致延遲癒合,甚至會造成嚴重髖臼錯位和髖臼壞死;其三:截骨術表面非常接近血管和坐骨神經,手術操作不當可能導致血管和神經截斷;最後:還有許多相關併發症,例如術後骨骼未癒合,及無法進行畸形矯正。
由於手術有高度困難性,而且 Ganz 截骨術也有風險,中國只有部分骨科醫院裡經驗豐富的醫師能夠執行此手術。為了解決臨床外科手術中髖⾅周圍截骨術 (Ganz 截骨術) 的許多缺點,上海電氣集團公司中央研究院與上海市第六人民醫院的研發團隊共同設計出新型的髖臼旋轉截骨術機器人 (SpheriObot)。SpheriObot 機器人由三個部分組成:「Spheri」、「O」和「bot」分別代表球形 (sphere)、截骨術 (osteotomy) 和機器人 (robot)。