


Olhando para o futuro com a osteotomia acetabular rotacional assistida por robô
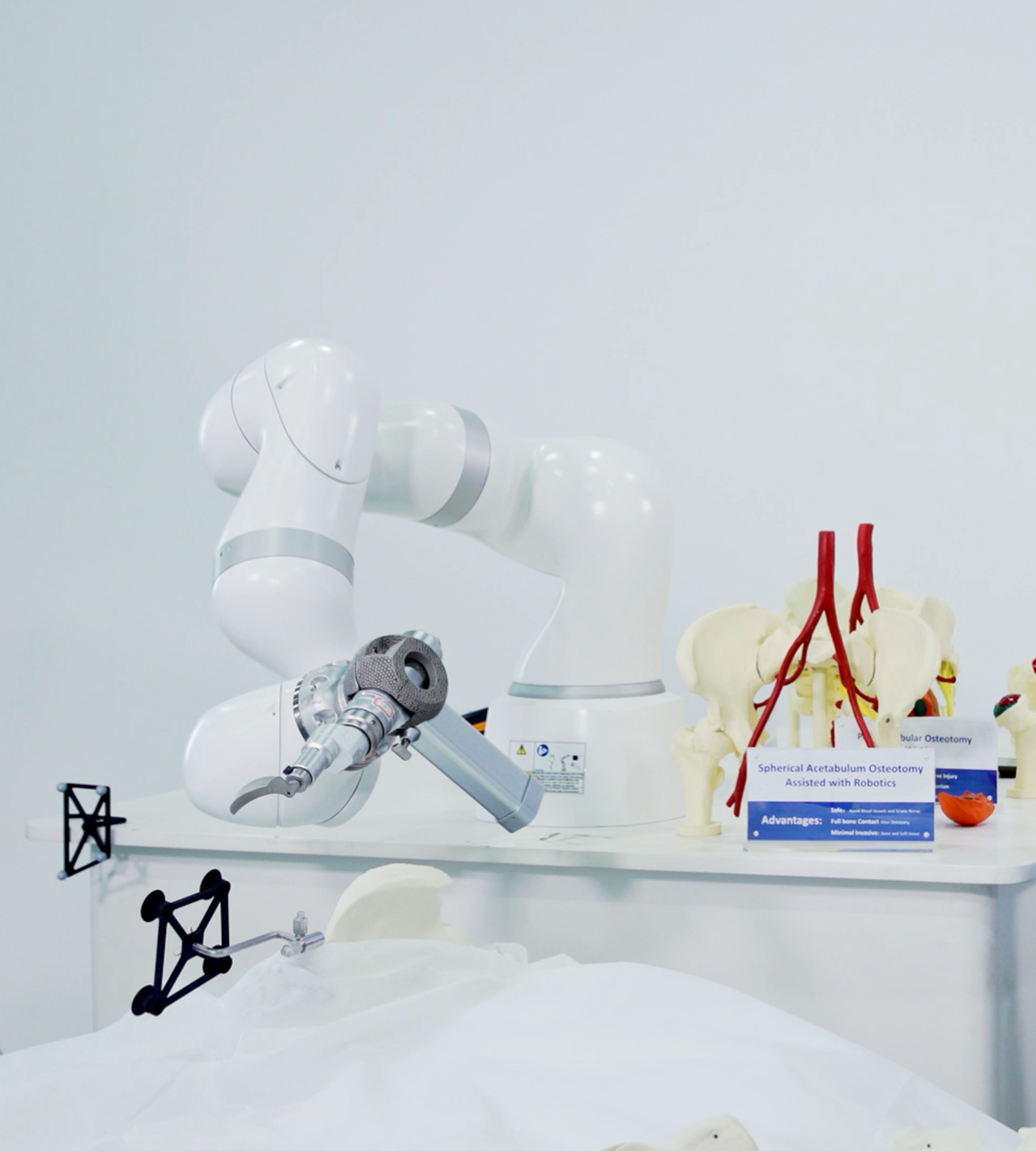
O Shanghai Sixth People's Hospital produziu o primeiro protótipo de um dispositivo de osteotomia esférica na China. Eles contarão com e serão apoiados pelos recursos de P&D, produção e marketing do Shanghai Electric Group para aprimorar e refinar o sistema, passar por vários testes na indústria e, finalmente, entrar no mercado.
Eles esperam que seus produtos sejam promovidos globalmente para o benefício das pessoas de todo o mundo e se tornem bons auxiliares para os médicos.
Eles esperam que seus produtos sejam promovidos globalmente para o benefício das pessoas de todo o mundo e se tornem bons auxiliares para os médicos.
