Vous utilisez le navigateur Internet Explorer. Pour bénéficier d’une représentation optimale, veuillez changer votre navigateur.
KUKA.RobotSensorInterface
Ce logiciel est une interface de communication entre le robot industriel et son système de capteurs et permet de programmer des applications de capteurs complexes de manière simple, universelle et efficace.
La Robot Sensor Interface simplifie les applications de capteurs complexes
KUKA.RobotSensorInterface (RSI) est un progiciel technologique pour la réalisation d'applications qui nécessitent un traitement cyclique des signaux et une action cyclique très performante sur le mouvement du robot, comme la rectification, le polissage, l'ébavurage (principe d'ôter l'excédent de métal sur une pièce d'usinage) et bien d'autres choses encore. Le progiciel technologique RSI comprend aussi bien les outils d'ingénierie nécessaires au développement de l'application que les composants logiciels nécessaires à la mise en service et à l'exécution de l'application pour la commande du robot industriel.
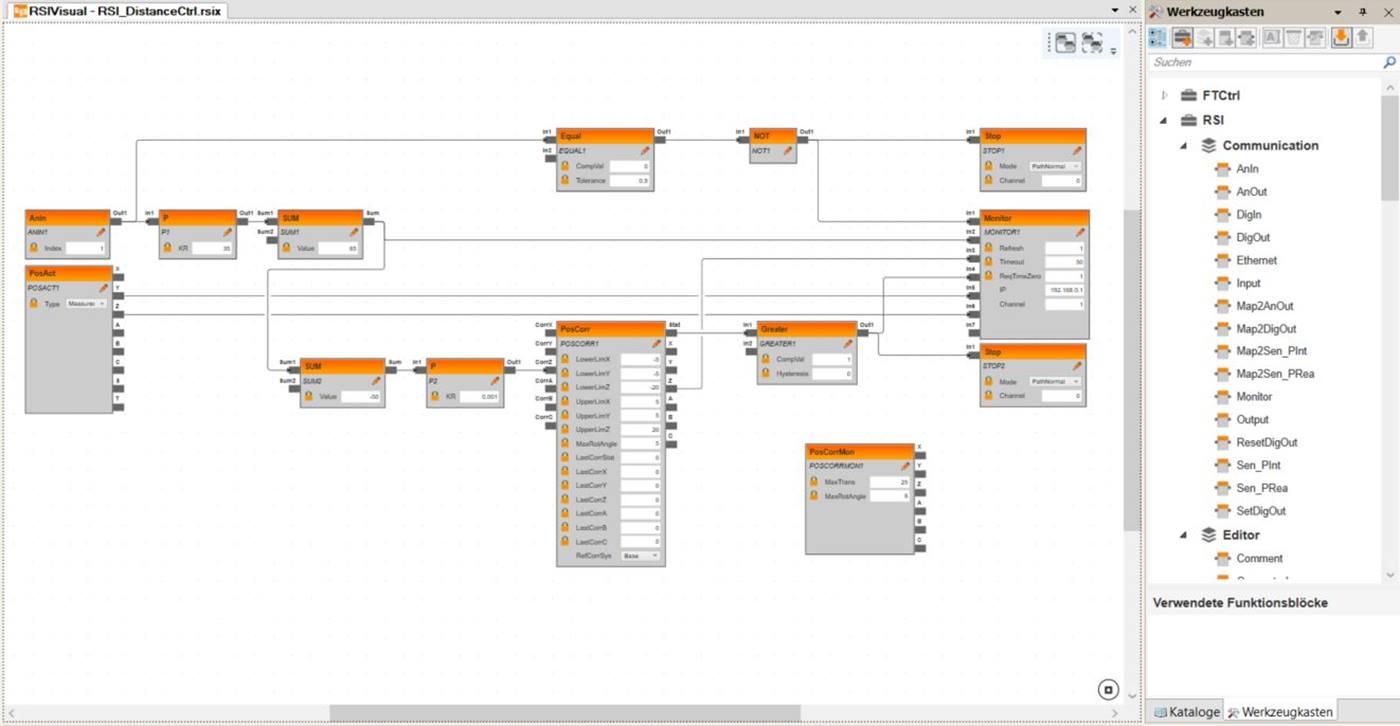
RSIVisual Editor - Programmation graphique sans effort
L'éditeur graphique RSIVisual permet de programmer très facilement le traitement des signaux d'une application sensible. Les objets RSI de la boîte à outils RSI permettent de lire et de traiter les valeurs de mesure cycliques des capteurs connectés. Le résultat peut être utilisé pour influencer le mouvement du robot. L'éditeur dispose d'un grand nombre de fonctions, notamment :
Création de blocs de fonctions individuels
Réalisation de toutes les fonctionnalités souhaitées
Programmation complète via RSIVisual intégré à l’Engineering Suite WorkVisual
Boîte à outils avec plus de 75 objets RSI pour la programmation graphique
Avec un capteur de distance sur la bride du robot, il est ainsi possible de maintenir par exemple une distance souhaitée par rapport à la surface d'une pièce, indépendamment de la trajectoire programmée.
Une intégration sans difficultés et une vue d'ensemble simple de vos applications complexes - vos avantages :
Fonctionne avec presque tous les robots KUKA et les axes externes
Intégration directe avec KUKA.ForceTorqueControl dans les applications RSI
Peut également être utilisée dans la production à la chaîne
Meilleure performance de sa catégorie
Traitement en temps réel en l’espace de 4 ms
Interface multifonctionnelle
Intégration directe dans KUKA.WorkVisual
Nous répondons à toutes vos exigences
L'intégration de KUKA.RobotSensorInterface va décupler les applications de votre robot industriel. De la manutention à l'inspection en passant par le montage, votre robot industriel peut être utilisé dans presque tous les domaines.
Avantages
Polissage & ébavurage
Ébavurage et polissage de précision des composants
Manutention
Contrôle du robot avec un joystick
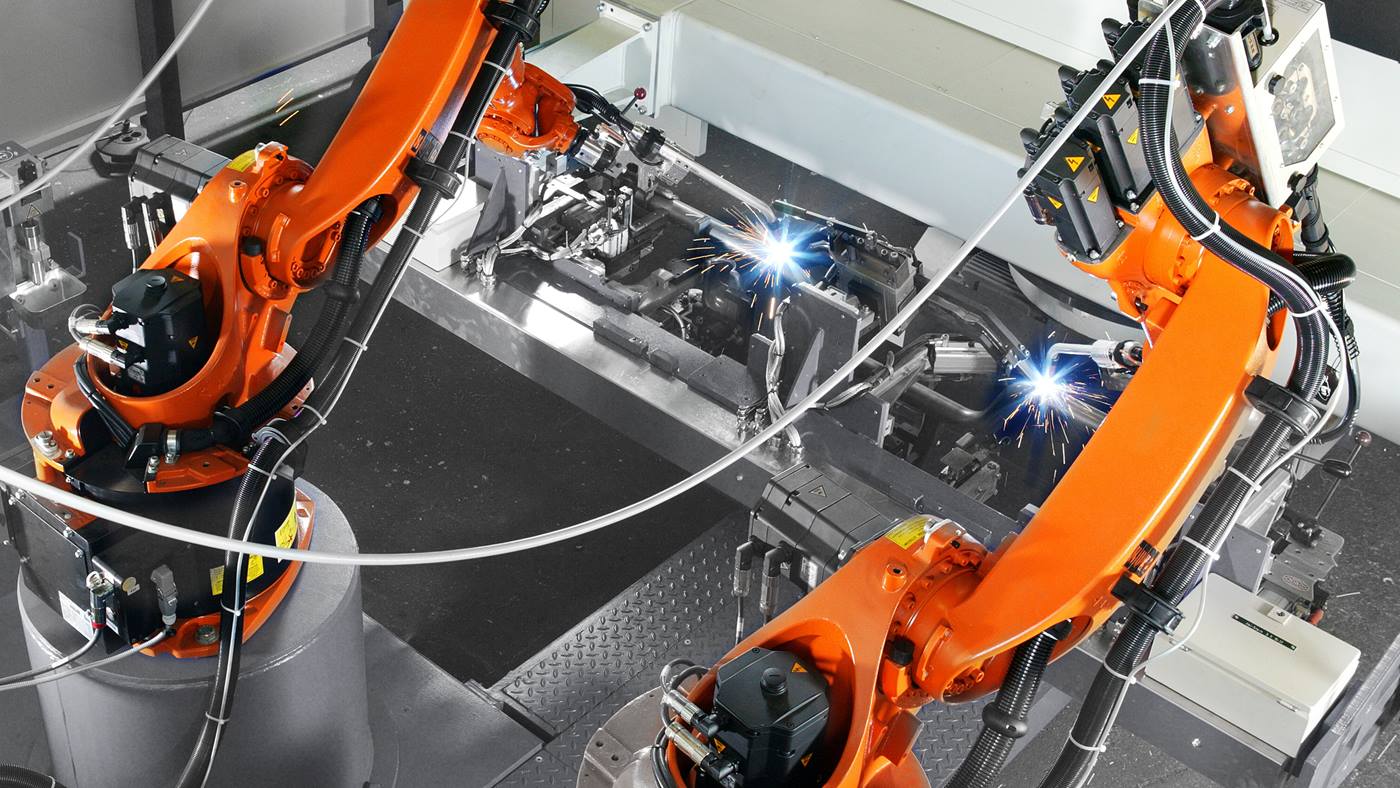
Soudage
Suivi du cordon de soudage à partir des données du processus de soudage
Montage
Assemblage de composants avec contrôle de force
Polissage
Mesure de la force appliquée et contrôle de la trajectoire du robot en temps réel
Contrôle & inspection
Le contrôle tactile est très utile pour différents types de produits : sièges, volants, interrupteurs, leviers et boutons
Transmission de données
Transmission en temps réel des données du robot et de l'application à un système externe
Créez votre propre application de capteur !
Utilisez votre savoir-faire pour trouver des solutions de processus et KUKA.RobotSensorInterface en interaction avec l’Engineering Suite KUKA.WorkVisual et KUKA.OptionPackageEditor et proposez à vos clients votre solution en tant qu’application KUKA à part entière.
Conditions requises par le système pour KUKA.RobotSensorInterface
Toutes les informations importantes toujours à portée de main
Pour avoir un aperçu des différentes versions et documentations ou pour vérifier la disponibilité de RSI, visitez KUKA Marketplace. Inscrivez-vous rapidement sur my.KUKA et accédez immédiatement à toutes les informations.