Sie verwenden den veralteten Browser Internet Explorer. Für eine optimale Darstellung unserer Website wechseln Sie bitte Ihren Browser
Künstliche Intelligenz: So wird ein neuronales Netz trainiert
Menschen gelingt es sehr gut, vermeintlich komplexe Aufgaben wie das Einstecken eines elektrischen Steckers, der an einem Kabel hängt, mit koordinierten Bewegungen zu lösen. Damit Roboter diese Aufgabe übernehmen können, muss ein künstliches neuronales Netz trainiert werden – ein Teilbereich der künstlichen Intelligenz.
Ulrike Götz
23. August 2023
Technology
Lesezeit: 4 Min.
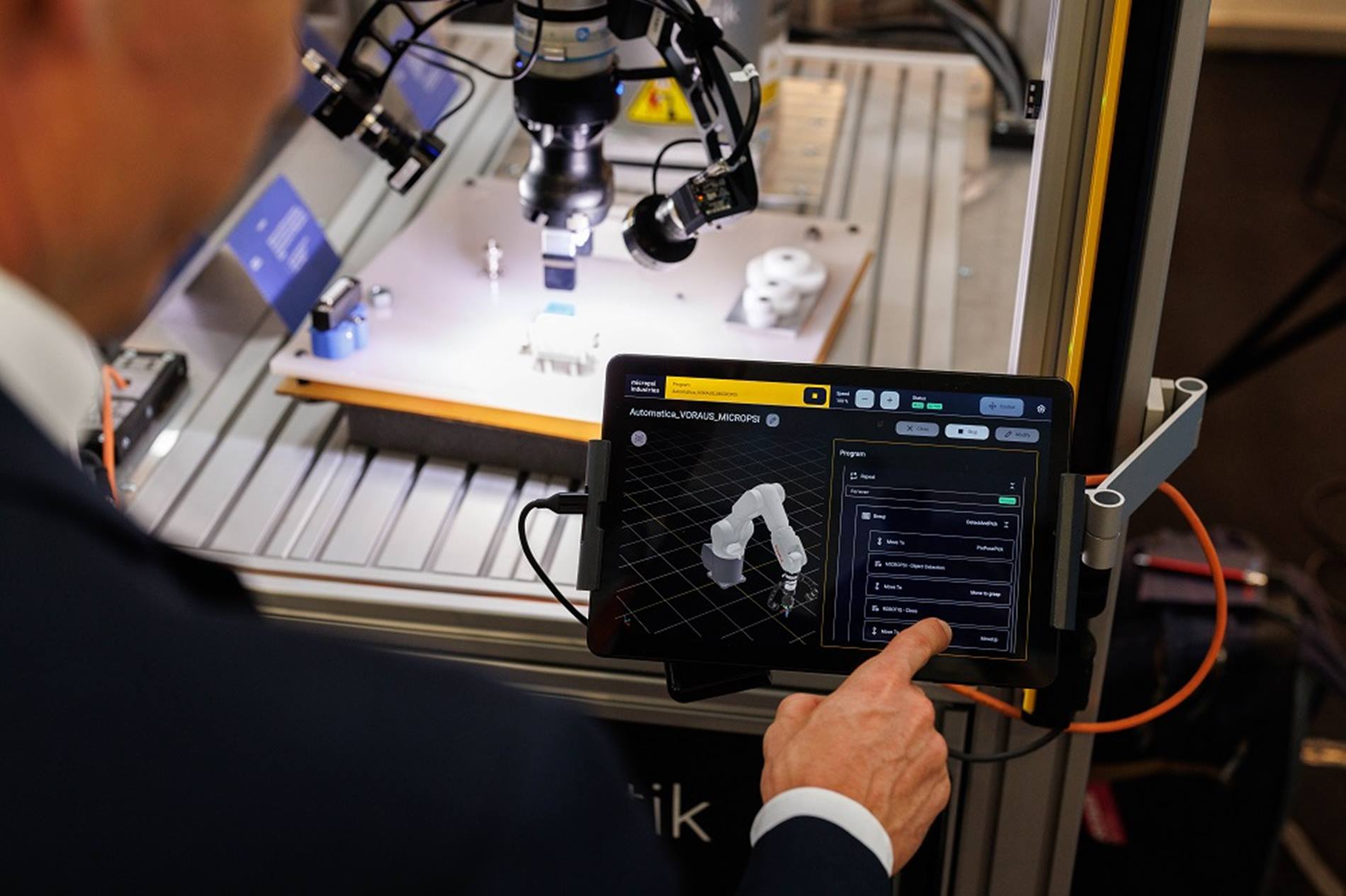
Wollen wir einen Stecker in eine Steckdose stecken, machen wir relative, Echtzeit-gesteuerte und relativ grobe Bewegungen auf die Steckdose zu und korrigieren die Position bei Bedarf bis der Stecker in der Steckdose steckt. Eine vergleichbare Strategie lässt sich seit dem Aufkommen von tiefen, künstlichen neuronalen Netzen auch in der Robotik umsetzen. Ein neuronales Netz, also quasi das Nervensystem einer Maschine, kann so trainiert werden, dass es das Ziel versteht, ohne dass man es explizit spezifizieren muss. Auf der automatica 2023 in München hat der Berliner KI-Spezialist Micropsi Industries demonstriert, wie ein von MIRAI gesteuerter KUKA Roboter den anspruchsvollen industriellen Prozess des Einsteckens von elektrischen Steckern bewältigt.
MIRAI ist ein KI-basiertes Vision-System, das in der Lage ist, ein künstliches neuronales Netz zu trainieren. "Um einen Roboter zu befähigen, ein biegeschlaffes Kabel aufzuheben und es in eine Buchse zu stecken, müssen Benutzer die tiefen neuronalen Netze trainieren, die in ihrem MIRAI-System stecken. Dieser Vorgang ist dabei einfacher als es klingt", sagt Prof. Dominik Bösl, CTO von Micropsi Industries. Für das Training positionieren Endnutzer das Werkzeug – in diesem Fall den Greifer – des Roboters an dem Punkt im Raum, an dem das Werkzeug relativ zum Objekt gehört, das gegriffen werden soll. „Nehmen wir das Beispiel, dass der Roboter den Stecker am Ende des Kabels finden soll. Eine einfache, am Handgelenk des Roboters angebrachte 2D-Farbkamera stellt der KI-Steuerung einen Stream an Bildern bereit, um dem Roboter zu zeigen, wohin er sich bewegen soll. Die Kamera fängt dabei das Ziel und seine Umgebung ein“, so Bösl weiter.
Ausreichend Daten in 20 Minuten
Für das perfekte Training des neuronalen Netzes muss das Kabel bewegt werden, um dem Roboter verschiedene Varianzen im Prozess zu zeigen. Der Greifer wird dann wieder an der richtigen Stelle platziert, der Standort gespeichert und der Roboter wird erneut herumgeführt. Es reicht aus, diesen Vorgang 20 Minuten zu wiederholen, um ausreichend Daten zu sammeln.
Die KI-Steuerung kann auf dieser Grundlage ihre Trainingsvorgänge starten und einen sogenannten „Skill“ für den Roboter berechnen. Der „Skill“ verallgemeinert im nächsten Schritt eine ihm gezeigten Varianzen und Beispiele. Bei der Ausführung der Aufgabe liest das neuronale Netz Bilder aus dem Stream der Kameraalle 50 ms. Damit entscheidet die KI-basierte Steuerung dann, wie der Roboter zu bewegen ist, um sich dem Stecker zu nähern – ohne genaue Angabe der Koordinaten.
Die Kamera am Roboter fängt sowohl das Ziel als auch die Umgebung ein.
Komplexe Aufgaben rentabel automatisieren
„MIRAI macht dank KI-basierter Vision-Technik und intelligenter Steuerung die Roboter so flexibel, dass sich damit auch komplexe Aufgaben, die mit klassischer Programmierung nicht oder nicht rentabel zu automatisieren sind, umsetzen lassen“, sagt Christian Felkel, Vice President Industry Management Electronics bei KUKA. Die Einsatzmöglichkeiten von MIRAI sind beinahe unbegrenzt und werden schon in fast allen produzierenden Branchen genutzt: von der hochautomatisierten Automobil- und Elektronikbranche über die Haushaltsgeräteindustrie bis hin zum mittelständisch geprägten Maschinenbau. Konkrete Anwendungen können das präzise Greifen und Einstecken von Kabeln oder Konnektoren sein, wie es bei End-of-Line-Tests anfällt, das Prüfen von Lötstellen im Herstellungsprozess von Kühl- und Klimatechnik, das Bestücken von Gestellen zum Galvanisieren von Bauteilen oder das Handling von reflektierenden oder transparenten Bauteilen. " Mit MIRAI erhalten unsere Roboter für all jene Prozesse, in denen Varianz auftritt – sei es Varianz in der Position, Form, Beschaffenheit oder Lichtverhältnissen – die nötige Auge-Hand-Koordination und Flexibilität", so Felkel weiter.
KUKA leistet einen Beitrag zu mehr Nachhaltigkeit in der Industrie. Doch wie macht KUKA das konkret und wie kommt das Unternehmen seiner sozialen und ökologischen Verantwortung nach?