KUKA.SeamTech Tracking 和 KUKA.SeamTech Finding
作為選項,應用軟體 KUKA.SeamTech Tracking 以及 KUKA.SeamTech Finding 可以新增到 KR C4 機器人控制系統中。透過智慧三角測量鐳射感測器,機器人可以在焊接前用 KUKA.SeamTech Finding 尋找工件和焊縫,在焊接期間用 KUKA.SeamTech Tracking 追蹤棱邊和焊縫。
您使用的是舊版 Internet Explorers 流覽器。
請更新您的流覽器以便獲得最佳顯示效果

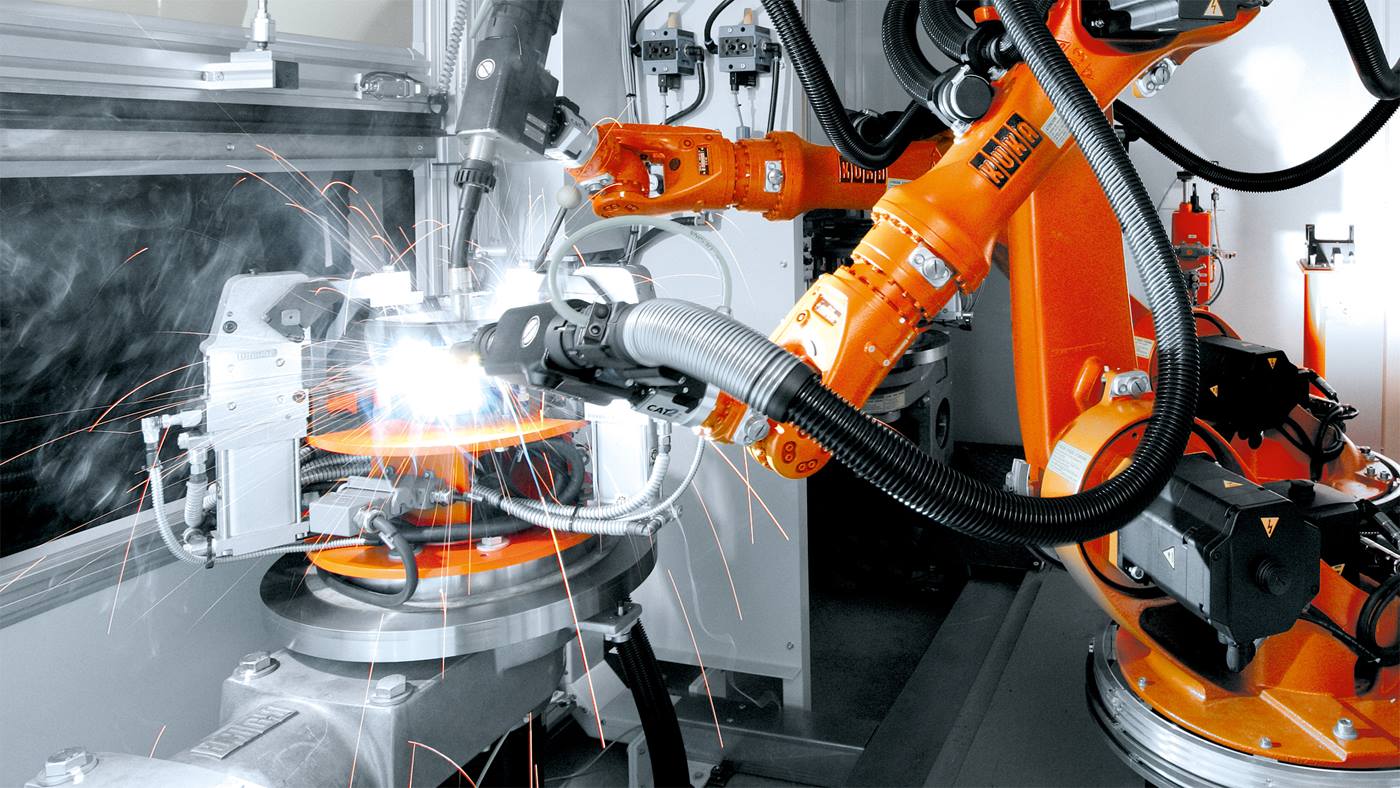
KUKA.SeamTech 的兩個軟體選項 Tracking 和 Finding 用於操作機器人上的智慧三角測量鐳射感測器。這些感測器可以用來尋找和追蹤鐳射焊和保護焊應用的焊縫。
作為選項,應用軟體 KUKA.SeamTech Tracking 以及 KUKA.SeamTech Finding 可以新增到 KR C4 機器人控制系統中。透過智慧三角測量鐳射感測器,機器人可以在焊接前用 KUKA.SeamTech Finding 尋找工件和焊縫,在焊接期間用 KUKA.SeamTech Tracking 追蹤棱邊和焊縫。
KUKA.SeamTech Finding 和 Tracking 是用於透過 Ethernet 對智慧三角測量鐳射感測器進行控制和編程的選項,其中 SeamTech Tracking 甚至還有高效率的即時記錄功能。
機器人感測器指令的應用程式編程照常透過條理清楚、可快速編程的行指令進行。在此過程中,可以快速操作機器人和感測器功能狀態鍵也非常有用。
KUKA.SeamTech Finding 和 Tracking 是獨立的技術套裝,可以與其他選項配合使用,例如 ArcTech Basic、ArcTech Advanced、LaserTech 或 GlueTech。
KUKA.SeamTech Tracking 可用於使用 SERVO-ROBOT Inc、Scansonic MI GmbH、BavariQ Sensor GmbH & Co. KG 或 wenglorsensoric GmbH 製造商的感測器執行邊緣和接縫追蹤。 還可以連接其他公司透過 Ethernet 乙太網路和 XML 協定進行通訊的感測器系統。 使用者可以使用適合感測器的介面協定將這些新增至 WorkVisual。
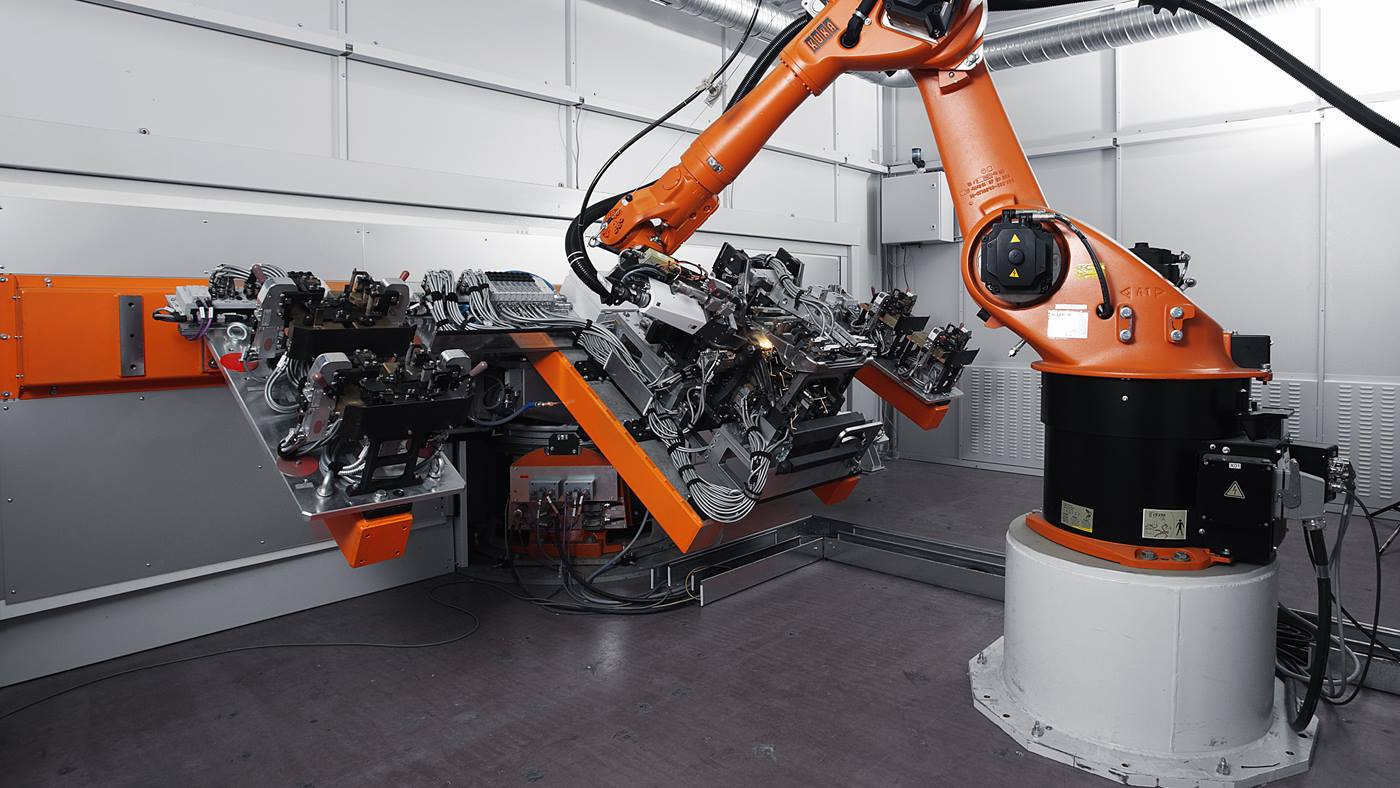
焊縫追蹤可以透過獨立的行指令針對各個焊接應用進行相應的編程設定,例如採用跳躍式或設定一個精確暫停。此外,SeamTech Tracking 也有用於動態尋找焊縫首尾的特殊指令。因此,機器人可以根據待焊接的工件自主調整焊縫位置和長度。
KUKA.SeamTechFinding 可用於操作 SERVO-ROBOT Inc、Scansonic MI GmbH、BavariQ Sensor GmbH & Co. KG 或 wenglorsensoric GmbH 製造商的感測器。 還可以連接其他公司透過 Ethernet 乙太網路和 XML 協定進行通訊的感測器系統。使用者可以使用根據感測器調整的介面協定將這些新增至 WorkVisual 中。用智慧線性鐳射感測器進行工件或焊縫尋找的最大優勢是,它可以在一次測量中記錄多項工件尺寸資訊。
藉由記錄的工件尺寸,KUKA.SeamTech Finding 軟體可以用最快的速度計算出工件、焊縫或單個軌跡點的平移量和 / 或旋轉量。透過這些計算,程式師可在機器人程式中極其靈活地取消和啟動多達六維的修正。透過這種方式,可以盡可能最理想和流程可靠地加工工件。