Sie verwenden den veralteten Browser Internet Explorer. Für eine optimale Darstellung unserer Website wechseln Sie bitte Ihren Browser
„Robin“ soll die robotergestützte Kniechirurgie auf ein neues Niveau heben
Das italienische Medizintechnikunternehmen Orthokey hat sein Robotersystem „Robin“ entwickelt, um orthopädische Chirurgen im Operationssaal zu unterstützen. Das System basiert auf dem LBR Med von KUKA und ermöglicht durch sein Navigationssystem präzise robotergestützte Eingriffe bei der Knie-Totalendoprothese.
Mehr Präzision bei der Knie-OP dank Roboter "Robin"
Der Erfolg einer Operation hängt oft von der Erfahrung und dem Können des Chirurgen ab – je komplexer der Eingriff, desto wichtiger sind die Operateure. Wenn sie manuell arbeiten, verwenden sie mechanische Geräte, was zeitaufwändig und potenziell fehleranfällig ist. Mit „Robin“ öffnet Orthokey die Tür zur computergestützten orthopädischen Chirurgie. „Robin“ ist ein intraoperatives Robotersystem, das den Chirurgen bei der Planung und Positionierung orthopädischer Implantate und der Durchführung präziser Knochenresektionen unterstützt. Dazu nutzt es das individuelle Patientenprofil sowie spezifische kinematische und anatomische Merkmale. „Wir positionieren mehrere Tracker am Patienten, die von einer Kamera mit einer Genauigkeit von weniger als einem Millimeter gesehen werden können. So kann der Chirurg die richtige Positionierung des Implantats für jeden einzelnen Patienten planen, bevor er eine Resektion durchführt“, erklärt Simone Bignozzi, Produktmanager bei Orthokey, das Prinzip von „Robin“.
Alle Schnittstellen des Systems vereinfachen komplexe Abläufe für die Anwender und machen die robotergestützte Kniechirurgie intuitiver.
Funktionalität und Erfahrung als entscheidende Faktoren
Dr. Domenico Alesi, orthopädischer Chirurg am Istituto Ortopedico Rizzoli in Bologna, lobt vor allem die einfache Bedienung des Systems: „'Robin' ist intuitiv und visuell ansprechend. Alle Schnittstellen vereinfachen die komplexen Prozesse für die Benutzer und erleichtern ihnen die Arbeit. Die Genauigkeit des Systems ist erstaunlich und es eignet sich nicht nur für hochspezialisierte Chirurgen, sondern für ein breites Spektrum von Ärzten.“ „Robin“ basiert zudem auf einem modularen Ansatz, der unterschiedliche Implantathersteller und Klinikkonzepte berücksichtigt. Nicht zuletzt setzt Orthokey bei seiner OP-Lösung auf hochwertige Komponenten, darunter den sensitiven Leichtbauroboter LBR Med von KUKA.
Die Ingenieure von Orthokey verglichen verschiedene Roboter und überlegten auch, einen eigenen zu entwickeln. Doch dann kam der LBR Med von KUKA ins Spiel, der sie aus drei Gründen überzeugte, wie Maria Pasquini, CTO des „Robin“-Projekts bei Orthokey, sagt: „Erstens ist der Roboterarm bereits für eine einfache und schnelle Integration in medizinische Geräte zugelassen, was die Zertifizierung des Gesamtsystems erleichterte und es schneller zur Marktreife brachte. Der zweite Aspekt sind die sieben Freiheitsgrade und die Sensoren in jedem Gelenk, die die Genauigkeit und Geschicklichkeit des Roboters im Operationssaal erhöhen können. Und drittens ist der LRB Med eine ausgereifte und etablierte Lösung mit zuverlässiger Software, sodass wir von Anfang an schnell und effektiv arbeiten konnten.“
Eine gemeinschaftliche Entwicklung als Mittel zum Erfolg
Von Anfang an war die Idee, das System einfacher und kleiner zu gestalten als vergleichbare Lösungen. Orthokey entwickelte den ersten Prototyp in Zusammenarbeit mit der Universität von Verona. „Der Proof of Concept war nach acht Monaten fertig, weitere neun Monate später war die Entwicklung von Hard- und Software abgeschlossen. Mit dieser ersten Version starteten wir dann über die benannte Stelle die Produktzertifizierung“, beschreibt Bignozzi den steinigen Weg von „Robin“ in den OP.
Zunächst werden die Instrumente am Robotersystem befestigt.
Während des gesamten Prozesses arbeitete das Team eng mit dem Forschungs- und Entwicklungsteam von KUKA zusammen und profitierte stark von dessen Erfahrung. „KUKA hat unter Beweis gestellt, dass es ein in der Medizintechnik sehr gut etabliertes Robotikunternehmen ist und auf das Wissen aus zahlreichen Projekten zurückgreifen kann. Das große Engagement jedes einzelnen Teammitglieds hat dazu beigetragen, dass 'Robin' ein Erfolg wurde“, betont Pasquini.
Hochpräzise Mensch-Roboter-Kollaboration
Wie funktioniert nun ein Eingriff mit „Robin“? Vor Beginn des Eingriffs bereitet das OP-Personal den OP sorgfältig vor, um eine reibungslose Interaktion zwischen Mensch und Robotersystem zu gewährleisten. Die korrekte Positionierung des Systems ist entscheidend, um ein reibungsloses Zusammenspiel mit dem Operationsteam und eine effiziente Manövrierfähigkeit im Operationssaal zu ermöglichen.
"Robin" ist intuitiv und visuell ansprechend.
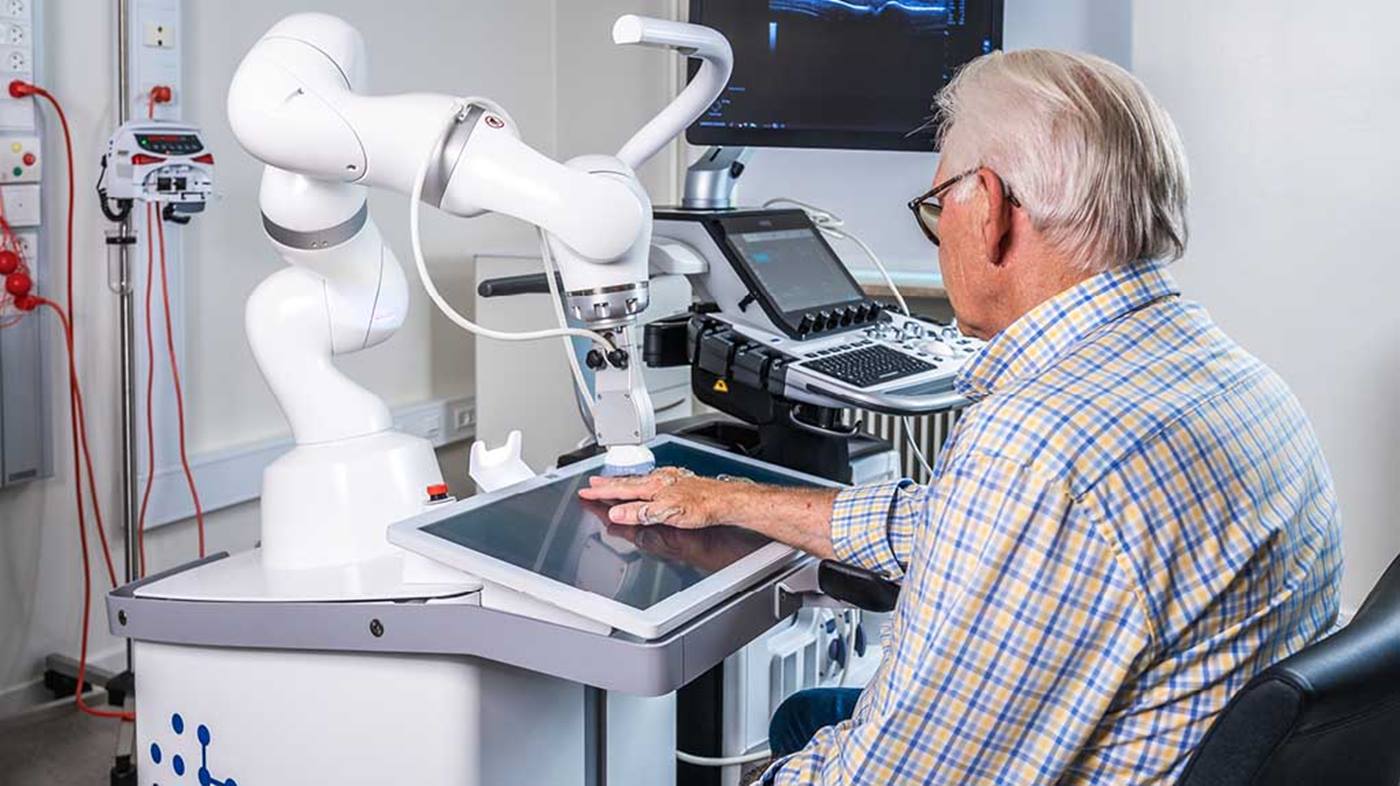
Während der Operation verwendet der Chirurg Infrarotmarker, um die Anatomie des Patienten auf dem Robotersystem abzubilden. Diese Markierungen machen den Patienten für das Gerät „sichtbar“. Das System kann dann die Anatomie und Position des Patienten in Echtzeit verfolgen und so eine genaue Ausrichtung und Führung während des chirurgischen Prozesses gewährleisten.
Da die Anatomie des Patienten auf dem Bildschirm erfasst und visualisiert wird, kann der Chirurg nun die Strategie für die Knochenresektionen genau planen.
Anhand der Erfassung und Visualisierung der Anatomie des Patienten auf dem Bildschirm kann der Chirurg die Strategie für die Knochenresektionen genau planen. Die detaillierte Visualisierung der Patientenmerkmale ermöglicht es dem Operateur, einen geeigneten Ansatz für den Eingriff zu entwickeln. Steht der Plan fest, kommt der Roboterarm ins Spiel. „Er arbeitet zunächst im Automatikmodus und steuert präzise auf den Patienten zu. Sobald er den vorgesehenen Bereich erreicht hat, geht das Verfahren in eine kollaborative Phase über. In diesem Modus kann der Chirurg die von „Robin“ gehaltene Schneidführung manuell auf die Zielebene einstellen, wobei der Roboterarm während des gesamten Prozesses präzise positioniert bleibt. Dieser kooperative Ansatz wird für jeden Schritt der Knochenresektion wiederholt, um eine gleichbleibende Präzision zu gewährleisten“, beschreibt Dr. Alesi die Zusammenarbeit zwischen Arzt und Medizinroboter.
Sobald alle erforderlichen Knochenresektionen abgeschlossen sind, setzt der Chirurg dem Patienten das orthopädische Implantat ein. Während dieser letzten Phase überwacht er die Beinkinematik und das Gesamtergebnis genau auf dem Bildschirm des Robotersystems. „Diese umfassende Überwachung stellt sicher, dass das Implantat exakt platziert und das gewünschte Operationsergebnis erzielt wird. Sobald der Chirurg den Erfolg des Eingriffs bestätigt hat, ist die Operation abgeschlossen und der Patient wird in die postoperative Versorgung überführt“, so Dr. Alesi weiter.
Partner im Operationssaal
„Robin“ ist bereit für den Markt. Derzeit läuft die Zertifizierung nach der Medical Device Regulation (MDR), danach will Orthokey weitere Zulassungen in verschiedenen Ländern beantragen – im nächsten Jahr zum Beispiel bei der Food and Drug Administration (FDA) in den USA. „Um dies zu erreichen und unser System kontinuierlich zu verbessern, arbeiten wir mit mehreren Referenzzentren auf der ganzen Welt zusammen. Die Rückmeldungen sind durchweg positiv. Die Benutzer schätzen die Abmessungen und das Gewicht von 'Robin' sowie die Einfachheit des chirurgischen Arbeitsablaufs“, sagt Simone Bignozzi.
Den Entwicklern ist es wichtig, dass der Medizinroboter nicht als Konkurrenz zum Chirurgen gesehen wird, sondern als Assistent im Operationssaal. Gerade für junge Chirurgen kann dies eine steilere Lernkurve als in der konventionellen Chirurgie ermöglichen. „'Robin' wird die Arbeitsmöglichkeiten nicht einschränken, sondern die Fähigkeiten der Beteiligten erhöhen. Das OP-Personal, einschließlich der Chirurgen, wird lernen, wie man das System nahtlos in die gewohnten Prozesse integriert. Der Chirurg profitiert von der patientenzentrierten Chirurgie und Ausreißer können reduziert werden, insbesondere bei Chirurgen, die eher selten operieren. Eine bessere Ausbildung von Assistenzärzten, ein besseres Verständnis von kniechirurgischen Eingriffen und die Erfassung zuverlässigerer Daten können weitere Vorteile des Systems sein“, betont Maria Pasquini.
Das Robotersystem ermöglicht es dem Chirurgen, die richtige Positionierung des Implantats für jeden einzelnen Patienten zu planen, bevor er eine Resektion durchführt.
Roboterbasierte Kniechirurgie auf einem neuen Niveau
Auch Dr. Domenico Alesi ist sich sicher, dass „Robin“ chirurgische Eingriffe auf ein neues Niveau heben wird. „Die Lösung zielt darauf ab, die Genauigkeit des Verfahrens kurzfristig zu verbessern, die Anzahl der chirurgischen Eingriffe zu reduzieren, die Variabilität zwischen den Chirurgen zu verringern und zu reproduzierbaren und präziseren Ergebnissen zu führen. All dies kann sich in einem besseren chirurgischen Ergebnis niederschlagen. Mittelfristig können wir so die chirurgischen Verfahren und die Erkennung der wichtigsten Einflussfaktoren weiterentwickeln“, sagt der Chirurg.
"Robin" ist bereit für den Markt.
Die Genauigkeit des Systems ist erstaunlich und es eignet sich nicht nur für hochspezialisierte Chirurgen, sondern für ein breites Spektrum von Ärzten.
Den Entwicklern ist es wichtig, dass der Medizinroboter nicht als Konkurrent des Chirurgen gesehen wird, sondern als Assistent im Operationssaal.
Frédéric Piasek, Business Development Manager Medical bei KUKA, freut sich auf die weitere Entwicklung: „Wir haben eine sehr gute und offene Partnerschaft mit Orthokey. Dank des ständigen Dialogs über technische Herausforderungen konnten wir die Lösung schrittweise weiterentwickeln. Außerdem stehen wir in regelmäßigem Kontakt über mögliche Entwicklungen. Ich bin gespannt, was die Zukunft der Zusammenarbeit mit Orthokey für uns bereithält.“