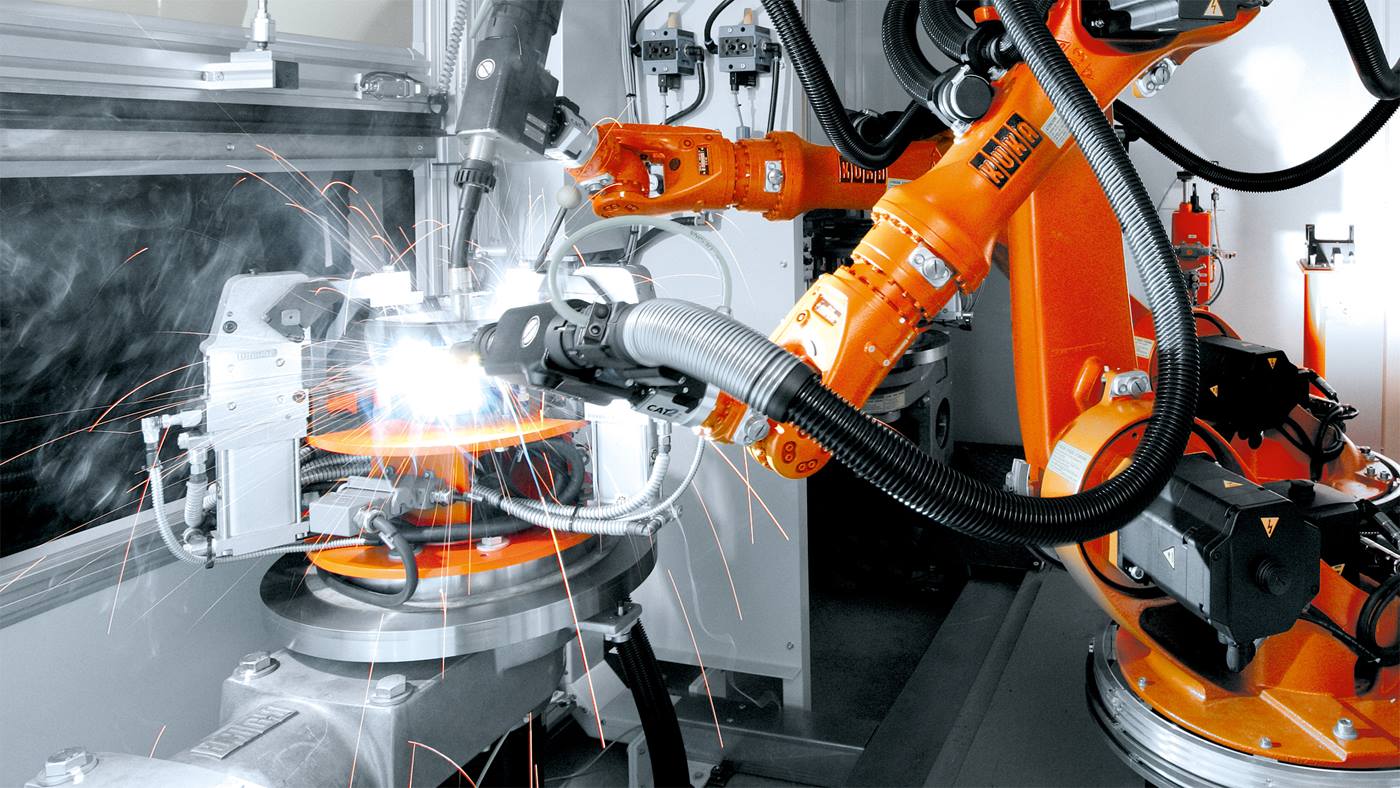
具有成本优势、动作灵活的机器人,适用于气体保护焊接、粘结与涂敷或激光切割等应用
由于采用了全新设计的控制器,KR CYBERTECH nano ARC 能够以更高的轨迹精度和速度进行工作。加速度值和低干扰轮廓的全新人体工程学设计,可以确保更高精度的轨迹运行,甚至可以深入部件内部。由于它具有非常细化的 6 和 8 公斤的负载分级,您可以找得到适合您应用领域的理想机器人型号。
KR CYBERTECH nano ARC 产品系列是轨迹应用(如保护气体焊接、涂胶和涂刷密封剂)的更好选择。这款工业机器人具有更好的性能和更高的功率密度,能够以更低的成本实现更大的经济效益。
6 - 8 有效载荷
1421 - 2010 可达距离