提高流水线效率
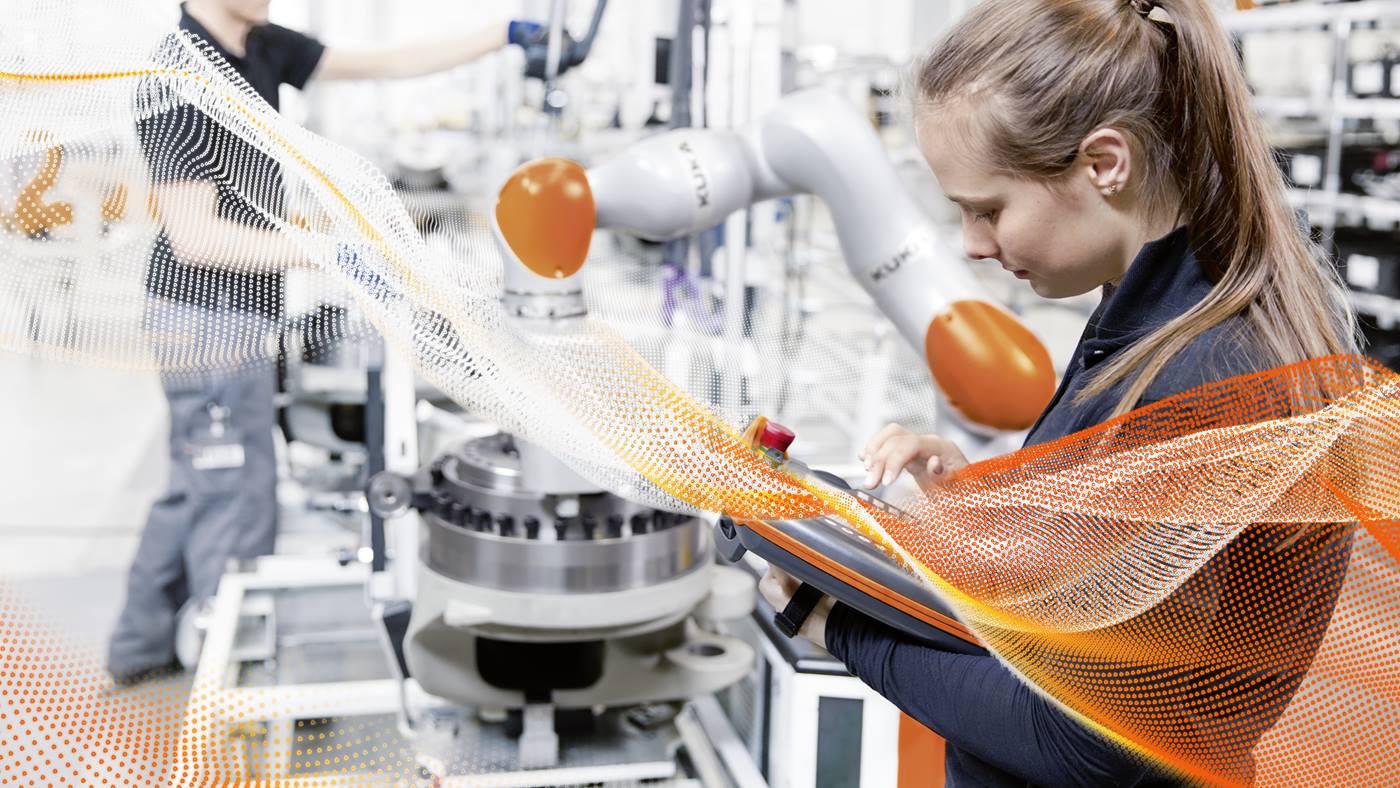
汽车制造商装配车间中的传送带沿着生产线运送部分装配好的车身,而装配工以规定的节拍时间装配其他零件或检查质量特征。对此,传送带的速度已根据人的节拍进行调整,因此能够在运转的传送带上进行装配作业或部件修整。为了提高流水线效率,人与机器人必须合作。灵敏的轻型机器人 KUKA LBR iiwa 在这方面非常理想,对于车厂的高安全要求iiwa能够轻松符合,能对工人的每一次触碰立即作出反应,并根据情境适当调整。

KUKA 通过流水线装配为汽车制造商开辟了车辆总装自动化的新领域。

智能型工作助手 KUKA LBR iiwa 的倒圆设计、灵敏的特性以及碰撞识别功能确保其能够在没有防护栏的情况下直接与人类协作,实现安全运行。

KUKA 的智能控制软件使轻型机器人与传送带或装配车保持稳定的连接,从而获得关于速度和位置的确切信息。在这个过程中,控制软件将获取的传送带上装配车的准确位置和速度数据直接传输给轻型机器人。借助这些信息,这款灵敏的机器人就可以动态地调整其操作以适应流水作业。
“测量相对于部件进行。这样机器人就能自主地在流水作业中完成其测量任务。”KUKA 应用设计部主管 Otmar Honsberg 解释说。“与传统的机器人辅助测量相比,这款机器人带来实实在在的附加价值。”配合光学检测功能及其触觉传感系统,灵敏的 KUKA LBR iiwa 在传送带振动或停止时自动进行调整以适应新情况,从而顺畅地继续自己的工作。

“运动中装配”解决方案使机器人成为测量设备的智能定位单元。