当社は、お使いのKUKAロボットに対象認識能力を与えます。
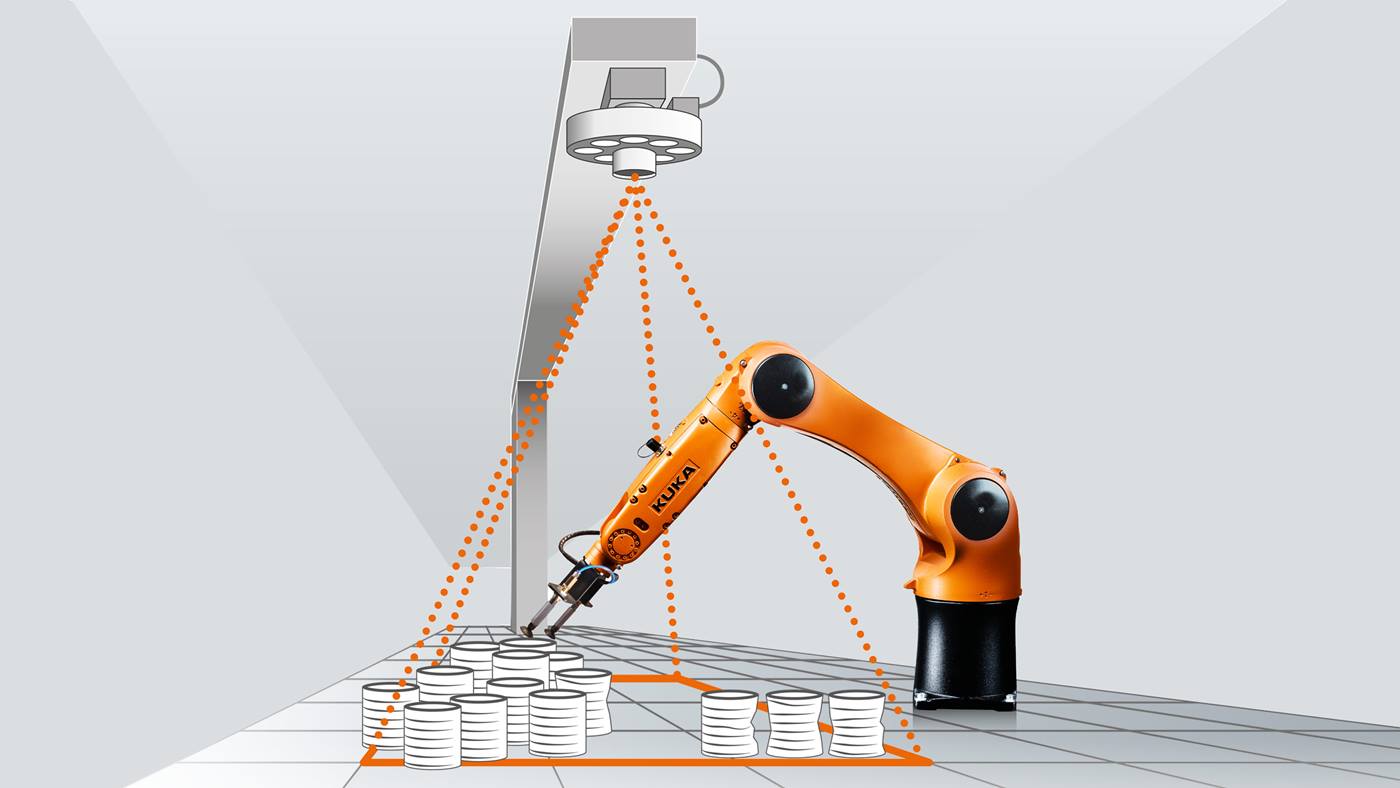
センサー搭載リアルタイム制御ロボット-センサーとコントローラー間の高速データ通信によって、ロボットは環境の変化に対応し、運動と同時に軌跡を決定できます。こうした特長が単純なハンドリング作業をはるかに超えるアプリケーションを実現します。
KUKAは、高度にフレキシブルな自動化のソリューションの開発と実行において 競争の中で一歩抜きん出るためにお客様をサポートします。メーカーから直接伝えられるノウハウを利用してお客様のロボットオートメーションのフレキシビリティと精密性を高めてください。
産業用画像処理用ソフトウェア
お客様は、ロボットをカメラシステムで制御するか部材を点検し測定したいとお考えですか?KUKAは、品質管理/2Dピックアンドプレースから複雑な形状の箱内把持(ビンピッキング)まで、あらゆる範囲の産業用画像処理に対応するソリューションを提供します。
KUKAのテクノロジー以外にも当社は、オーダーメイドのインターフェースを通じて第三者の提供者のセンサーとカメラシステムもお客様ご自身のシステムと接続します。
KUKA産業用ロボットのためのフォース/トルクセンサー
お客様は、敏感な部材を取り扱っているかあるいは定義された組立力を必要としていますか?当社は、お客様のロボットに感覚を教えます!お客様の組立のためのアプリケーションから触覚検査、力を調整する必要のある作業に至るまでの課題を解決するために、当社は、ハードウェアとソフトウェアのサービスを同時に提供しています。当社は、お客様が提供する フォース/トルクセンサー をソフトウェア KUKA.ForceTorqueControlを利用してお客様のKUKAロボットに接続する際にサポートします。
また、当社は、様々な 測定センサーテクノロジー、例えば 距離センサーをソフトウェアKUKA.RobotSensorInterfaceを使用してお客様のKUKA制御装置に接続します。さらに、当社の専門家がお客様のリアルタイム制御アプリケーションをプログラミングする際にお客様をサポートし、お客様の自動化の問題をフォース/トルクセンサーを使用して最適な形で実行するための貴重な助言を提供します。