


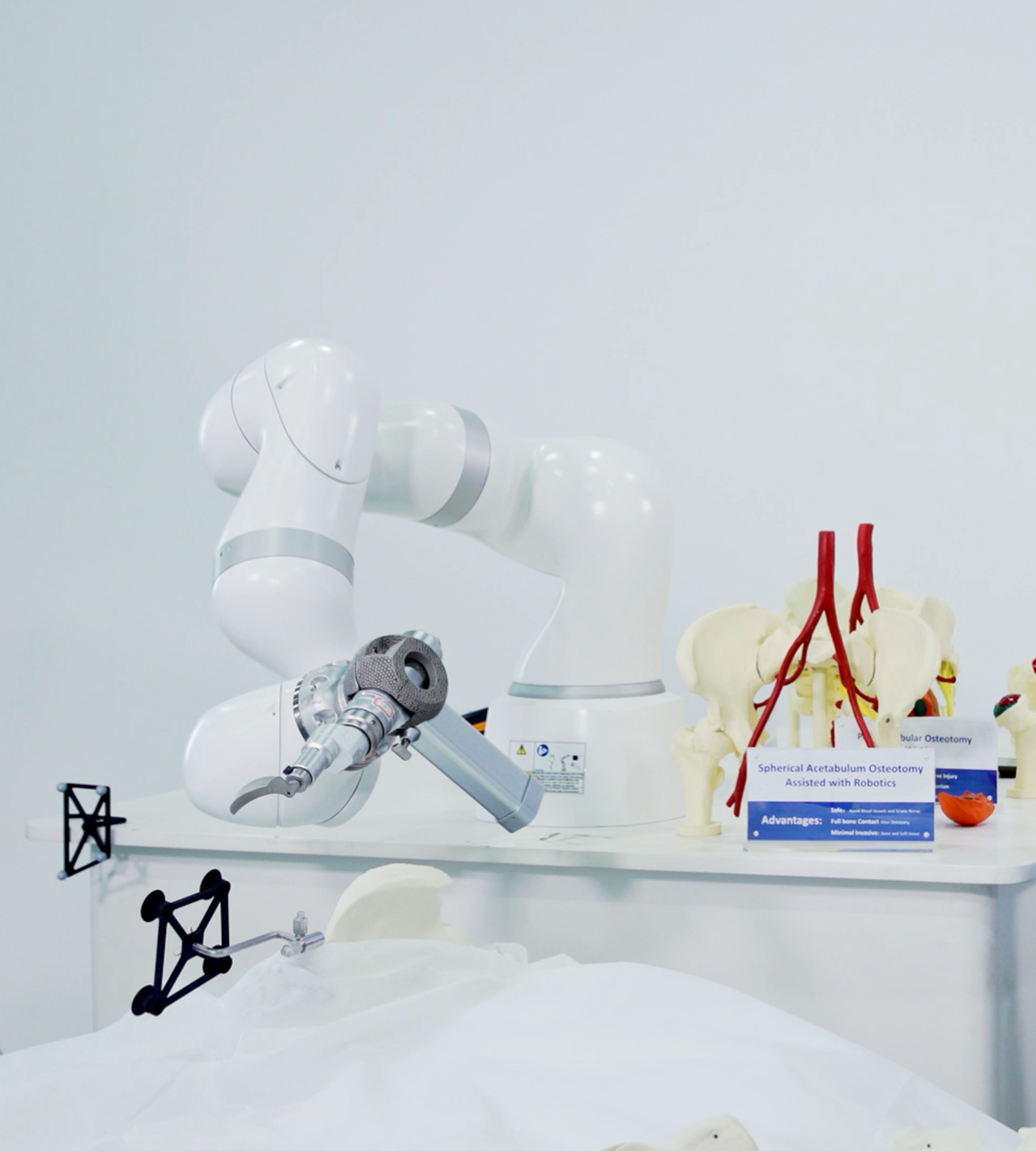
A jövőbe tekintünk a robottámogatású csípővápa forgási tengelykorrekcióval
A sanghaji Sixth People’s Hospital készítette el Kínában a gömbalakú tengelykorrekciós készülékek első prototípusát. A Shanghai Electric Group kutatás-fejlesztési, gyártási részlegének támogatásával és a marketing részleg erőforrásaira alapozva a jövőben javítani és finomítani fogják a rendszert, elvégeznek számos tesztelést az ipari környezetben, végül piacra fognak lépni.
Azt remélik, hogy termékeiket az egész világon reklámozni fogják az emberiség egészségi állapotának javítása érdekében és így nagy segítséget fognak jelenteni az orvosoknak.
Azt remélik, hogy termékeiket az egész világon reklámozni fogják az emberiség egészségi állapotának javítása érdekében és így nagy segítséget fognak jelenteni az orvosoknak.
