产品组合实现了较大的灵活性和低廉的总体拥有成本
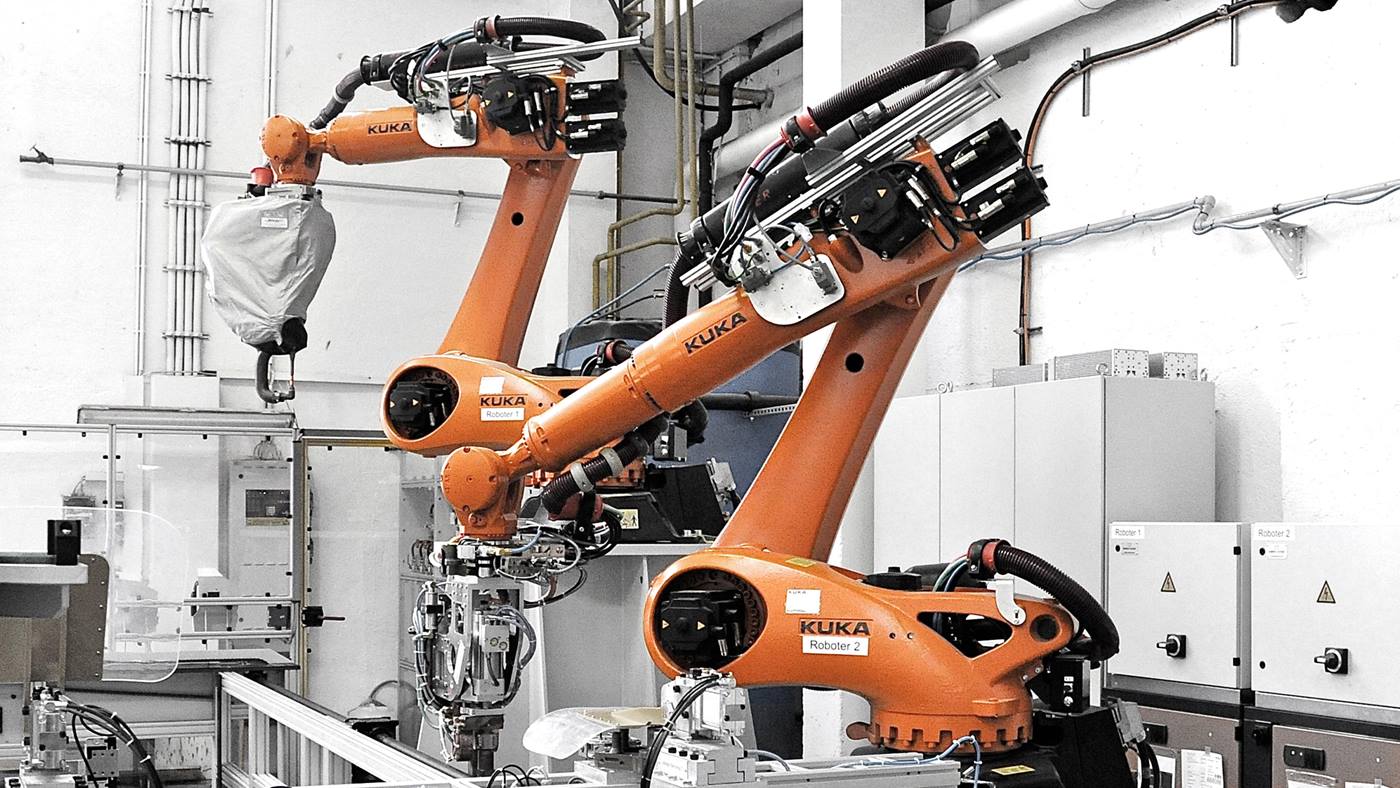
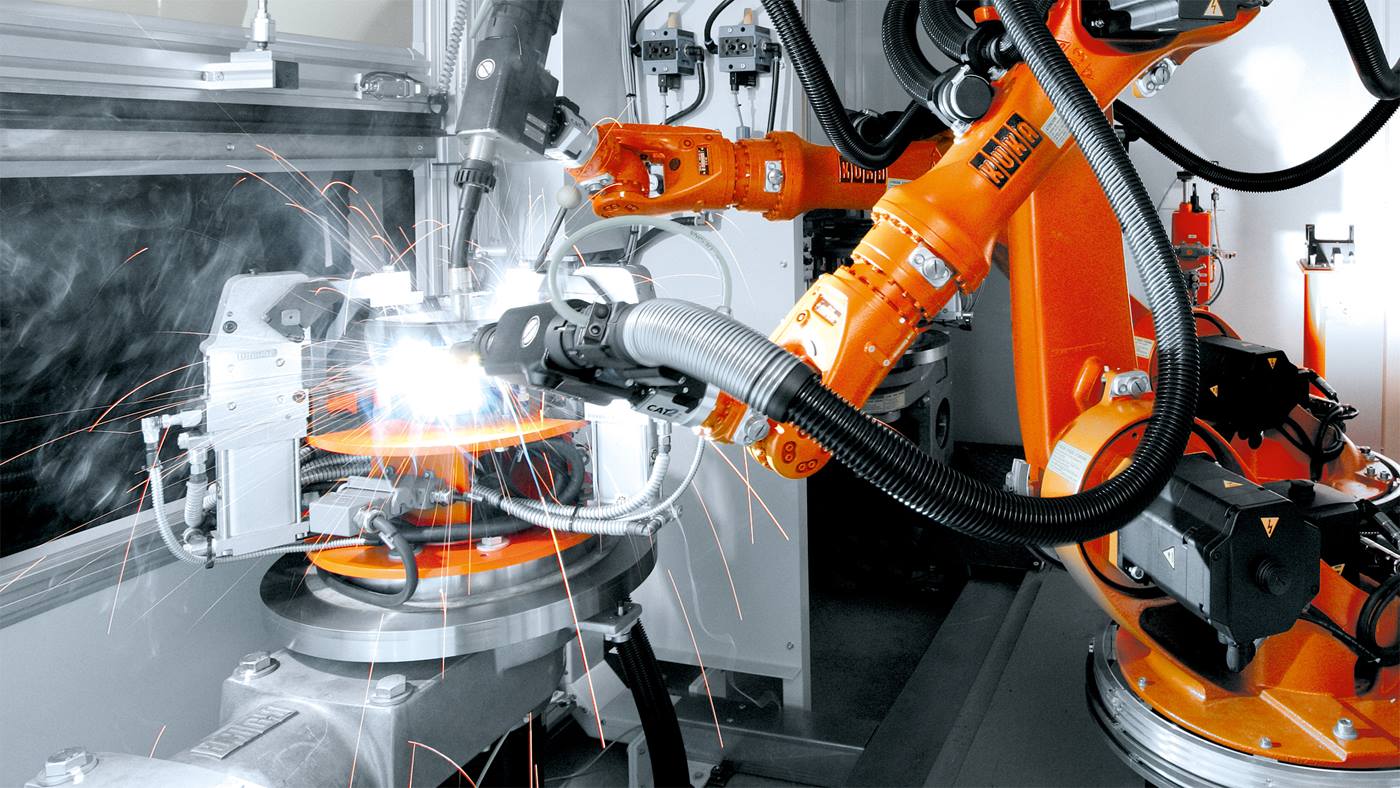
KR QUANTEC 系列是基于 KUKA 在充满活力的自动化世界中的经验开发的。成效:适用于您的生产环境的可靠、多样化和高效的高质量解决方案。客户会受益于 KR QUANTEC 机器人广泛的应用范围,其性能、经济性和灵活性令人信服。
修长的模块可确保量身定制的灵活机器人、快速的交货时间以及低廉的总体拥有成本 – 例如由于降到相当低的保养成本和减少的备件数量。现场升级负载的能力和确保生产过程中理想工艺质量的运动模式使 KR QUANTEC 成为一台高度灵活的机器,并成为您对未来生产的一项安全投资。