Az Internet Explorer kereső egy régebbi verzióját használja. Az optimális megjelenítés érdekében kérjük, frissítse keresőjét.
„Robin” új szintre emeli a robotvezérelt térdsebészetet
Az olasz székhelyű Orthokey orvostechnológiai vállalat „Robin” elnevezésű robotrendszerét azért fejlesztette ki, hogy támogassa az ortopéd sebészeket a műtőben. Navigációs rendszerének köszönhetően a KUKA LBR Med-re épülő berendezés precíz, robot-asszisztált műtétet tesz lehetővé a teljes térdízületi arthroplasztikához.
Nagyfokú precizitás a térdsebészetben „Robin”-nak köszönhetően
A műtét sikere gyakran a sebész tapasztalatától és készségeitől függ – minél összetettebb az eljárás, annál fontosabb szerepet játszik a sebész. Ha manuálisan dolgoznak, akkor mechanikus eszközöket használnak, ami időigényes és potenciálisan benne rejlik a hibalehetőség. „Robin” segítségével az Orthokey megnyitja az utat a fejlett számítógép-asszisztált ortopédiai sebészet előtt. A Robin egy intraoperatív robotrendszer, amely támogatja a sebésztaz ortopédiai implantátumok megtervezésében és behelyezésében, valamintprecíz csontreszekciók végrehajtásában. Ehhez egyéni páciensprofilt, valamint specifikus kinematikai és anatómiai jellemzőket használ fel. „Több nyomkövetőt helyezünk el a páciensen, amelyeket egy kamera 1 milliméternél kisebb pontossággal láthat. Ez lehetővé teszi a sebész számára, hogy minden egyes páciens esetében még a reszekció elvégzése előtt megtervezze az implantátum megfelelő behelyezését” – árulta el Simone Bignozzi, az Orthokey termékmenedzsere, rávilágítva a „Robin” mögött álló alapelvre.
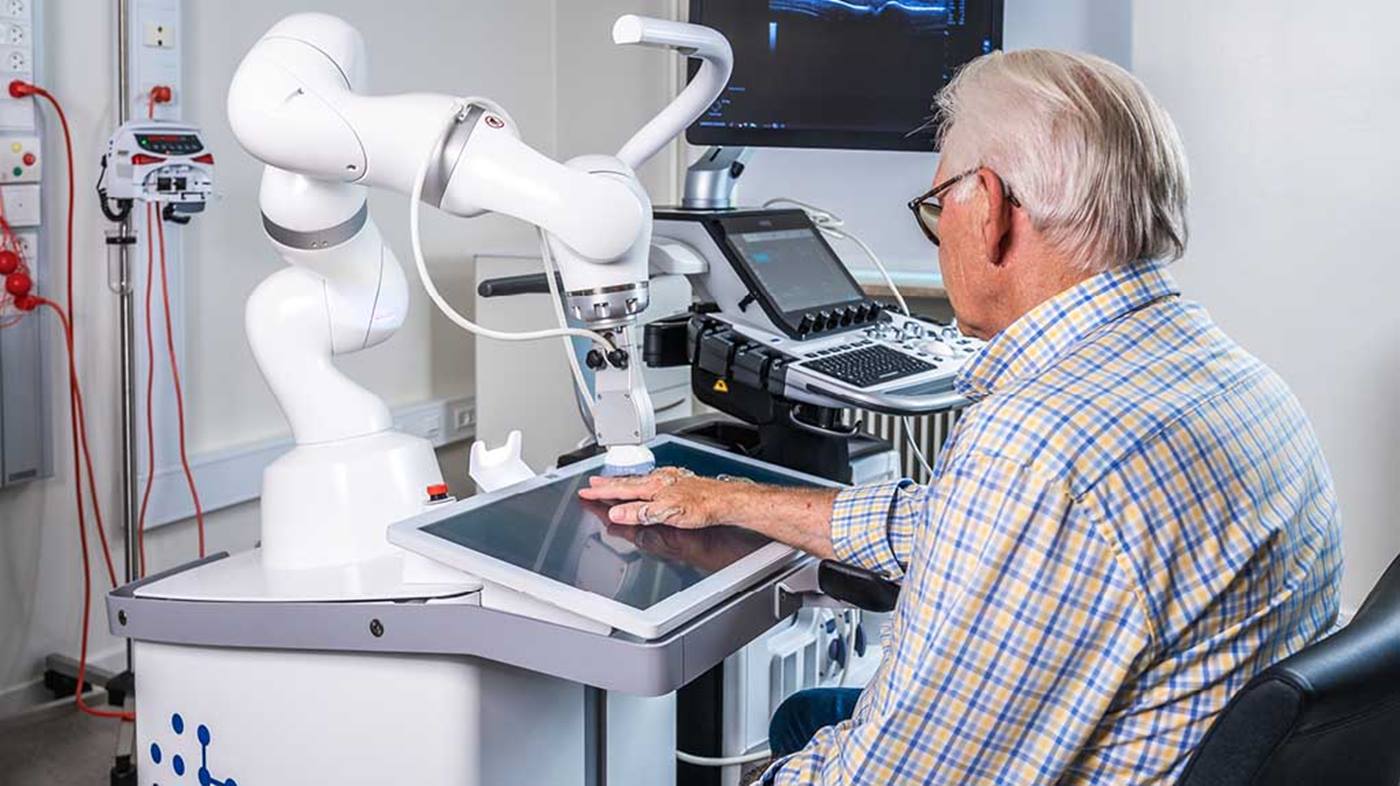
A berendezés interfészei leegyszerűsítik az összetett folyamatokat az üzemeltetők számára, és intuitívabbá teszik a robotvezérelt térdsebészetet.
A funkcionalitás és a tapasztalat dönt
Dr. Domenico Alesi, a bolognai Istituto Ortopedico Rizzoli ortopéd sebésze különösen a rendszer könnyű használhatóságát dicséri: „Robin” intuitív és vizuálisan is tetszetős. Az interfészek leegyszerűsítik az összetett folyamatokat a üzemeltetők számára, ezzel megkönnyítik a munkájukat.” „Robin” emellett moduláris megközelítésen alapul, amely a különböző implantátumgyártókat és a kórházi koncepciókat is figyelembe veszi. Végül, de nem utolsósorban, a műtős megoldásait tekintve az Orthokey kiváló minőségű alkatrészekre támaszkodik, beleértve a KUKA érzékeny, könnyűépítésű robotját, az LBR Med-et.
Az Orthokey mérnökei különböző robotokat hasonlítottak össze, és a saját fejlesztés lehetőségét is megfontolták. Ekkor azonban szóba került a KUKA LBR Med, amely három okból is meggyőzte őket, ahogy Maria Pasquini, az Orthokey „Robin” projektjének műszaki igazgatója elmondta: „Először is, a robotkar már rendelkezik tanúsítvánnyal az orvosi eszközökbe való egyszerű és gyors integráció érdekében, amely megkönnyítette a teljes berendezés tanúsítását, és a gyorsabb piacra kerülését. A második tényező a hét szabadságfok és az egyes ízületekben található érzékelők, amelyek növelhetik a robot precizitását és kézügyességét a műtőben. Harmadszor pedig, az LRB Med egy megbízható szoftverrel rendelkező kiforrott és bevált megoldás, így már a kezdetektől fogva gyorsan és hatékonyan tudtunk vele dolgozni.”
Közös fejlesztés
Kezdettől fogva az volt az ötlet, hogy a berendezést a hasonló megoldásoknál egyszerűbbre és kisebbre tervezzük. Az Orthokey a Veronai Egyetemmel együttműködésben fejlesztette ki az első prototípust. „Nyolc hónap után elkészült a koncepciópróba, kilenc hónappal később pedig befejeződött a hardver és a szoftver fejlesztése. Elkészült az első kiadás, és a dokumentációt elküldtük a bejelentett szervezetnek terméktanúsítás céljából” – mondta Bignozzi, ismertetve „Robin” rögös útját a műtőbe.
Először is, a műszereket a robotrendszerhez rögzítik.
A teljes folyamat során a csapat szorosan együttműködött a KUKA kutatási és fejlesztési csapatával, és nagymértékben profitált a tapasztalataikból. „Egyértelmű volt, hogy a KUKA egy rendkívül jól megalapozott robotikai cég az orvosi alkalmazások terén, és számos projektből meríthet tudást. Az egyes csapattagok erős elkötelezettsége hozzájárult „Robin” sikeréhez” – hangsúlyozta Pasquini.
Precíziós ember-robot együttműködés
Tehát hogyan működik egy beavatkozás „Robin”-nal? Az eljárás megkezdése előtt a műtős személyzet aprólékosan előkészíti a munkaterületet, hogy biztosítsa az emberek és a robotrendszer közötti zökkenőmentes interakciót.A robotrendszer helyes elhelyezése kulcsfontosságú, amely lehetővé teszi a sebészeti csapattal való zökkenőmentes integrációt és a hatékony manőverezést a műtőben. Az eszközök pontos pozicionálása és a robotrendszer gondos kalibrálása a zökkenőmentes, problémamentes munkafolyamat érdekében az egész eljárás során kulcsfontosságú.
„Robin” intuitív és vizuálisan is tetszetős.
A műtét során a sebész infravörös markerek segítségével feltérképezi a páciens anatómiáját a robotrendszeren. Ezek a markerek „láthatóvá” teszik a pácienst az eszköz számára. A rendszer ezután valós időben nyomon követi a páciens anatómiáját és helyzetét, így biztosítva a pontos beállítást és útmutatást a műtéti folyamat során.
Amint a páciens anatómiája regisztrálásra kerül és megjelenik a képernyőn, a sebész pontosan meg tudja tervezni a csontreszekciók stratégiáját.
Amint a páciens anatómiája regisztrálásra kerül és megjelenik a képernyőn, a sebészpontosan meg tudja tervezni a csontreszekciók stratégiáját. A páciens jellemzőinek részletes megjelenítése lehetővé teszi számára, hogy megfelelő megközelítést alkalmazzon az eljáráshoz. A terv véglegesítése után működésbe lép a robotkar. „Először automatikus üzemmódban működik, és pontosan megközelíti a pácienst. Amint elérte a kívánt területet, az eljárás kollaboratív fázisba lép. Ebben az üzemmódban a sebész manuálisan beállíthatja a „Robin” által tartott vágásvezetőt a célsíkra, miközben a robotkar megőrzi kivételes precizitását, és biztosítja, hogy a vágásvezető az egész folyamat során pontosan pozicionálva maradjon. A következetes precizitás biztosítása érdekében ezt az együttműködésen alapuló megközelítést a csontreszekció minden egyes lépésénél megismételjük” – árulta el Dr. Alesi a sebész és az orvosi robot közötti együttműködésről.
Miután az összes szükséges csontreszekciót elvégezték, a sebész az ortopéd implantátumot a páciensre helyezi. Ebben az utolsó fázisban szorosan figyelemmel kíséri a láb kinematikáját és a teljes eredményt a robotrendszer képernyőjén. „Ez az átfogó monitorozás biztosítja az implantátum pontos behelyezését és a kívánt műtéti eredmény elérését. Miután a sebész megerősíti az eljárás sikerességét, a műtét befejeződik, és a pácienst posztoperatív ellátásba helyezik” - mondta el Dr. Alesi.
Társ a műtőben
„Robin” készen áll a piacra. Jelenleg folyik a Medical Device Regulation (MDR) szerinti tanúsítás, amely után az Orthokey további engedélyeket kíván kérvényezni különböző országokban – jövőre például az Egyesült Államok Élelmiszer- és Gyógyszerügyi Hatóságánál (FDA). „Ennek elérése és rendszerünk folyamatos fejlesztése érdekében világszerte számos referenciaközponttal dolgozunk együtt. A visszajelzések következetesen pozitívak. A felhasználók nagyra értékelik a „Robin” méreteit és súlyát, valamint a sebészeti munkafolyamat egyszerűségét” – árulta el Simone Bignozzi.
A fejlesztők számára fontos, hogy az orvosi robotra ne a sebész versenytársaként, hanem a műtőben lévő asszisztensként tekintsenek. Ez különösen a fiatal sebészek számára jelenthet nagy előnyt, mivel náluk meredekebb lehet a tanulási görbe, mint a hagyományos sebészetben. „„Robin” nem korlátozza a munkalehetőségeket, hanem fejleszti az érintettek készségeit. A műtős személyzet, köztük a sebészek, megtanulják, hogyan kell zökkenőmentesen kommunikálni a kiegészítő eszközzel. A sebész profitálhat a betegközpontú sebészetből, és a kiugró értékek csökkenthetők, különösen a kevés műtéttel rendelkező sebészek esetében. Ez hatással lesz a műtő kialakítására, ám ez a hatás minimális lesz. A rendszer további haszna lehet a rezidensek és munkatársak jobb képzése, a térdsebészeti eljárások jobb megértése, a megbízhatóbb adatgyűjtés, valamint a sebészeti gyakorlat továbbfejlesztésének elősegítése” – hangsúlyozta Maria Pasquini.
A robotrendszer lehetővé teszi a sebész számára, hogy a reszekció elvégzése előtt minden egyes páciens számára megtervezze az implantátum megfelelő elhelyezését.
A robotvezérelt térdsebészet új szintre lépett
Dr. Domenico Alesi abban is biztos, hogy „Robin” új szintre emeli a sebészeti eljárásokat. „A megoldás célja, hogy rövid távon javítsa az eljárás pontosságát, csökkentse a sebészeti kézmozdulatok számát, csökkentse a sebészek közötti variabilitást, valamint reprodukálható, és precízebb eredményekhez vezessen. Mindez egy jobb sebészeti eredményben is tükröződhet. Középtávon ez lehetővé teszi a sebészeti eljárások továbbfejlesztését és a legfontosabb befolyásoló tényezők felderítését” – mondta a sebész.
„Robin” készen áll a piacra.
A berendezés elképesztő pontossággal rendelkezik, és nem csak a magasan képzett sebészek, hanem az orvosok széles köre számára is alkalmas.
A fejlesztők számára fontos, hogy az orvosi robotra ne a sebész versenytársaként, hanem a műtőben lévő asszisztensként tekintsenek.
Frédéric Piasek, a KUKA orvosi üzletfejlesztési menedzsere alig várja: „Rendkívül jó és nyitott partneri viszonyt ápolunk az Orthokey-vel. A technikai kihívásokról folytatott folyamatos eszmecserének köszönhetően a megoldás terén fokozatosan előrelépést érünk el. Emellett rendszeresen tartjuk a kapcsolatot a lehetséges fejlesztésekkel kapcsolatban. Kíváncsian várom, mit tartogat számunkra az Orthokey-vel való együttműködésünk jövője.”