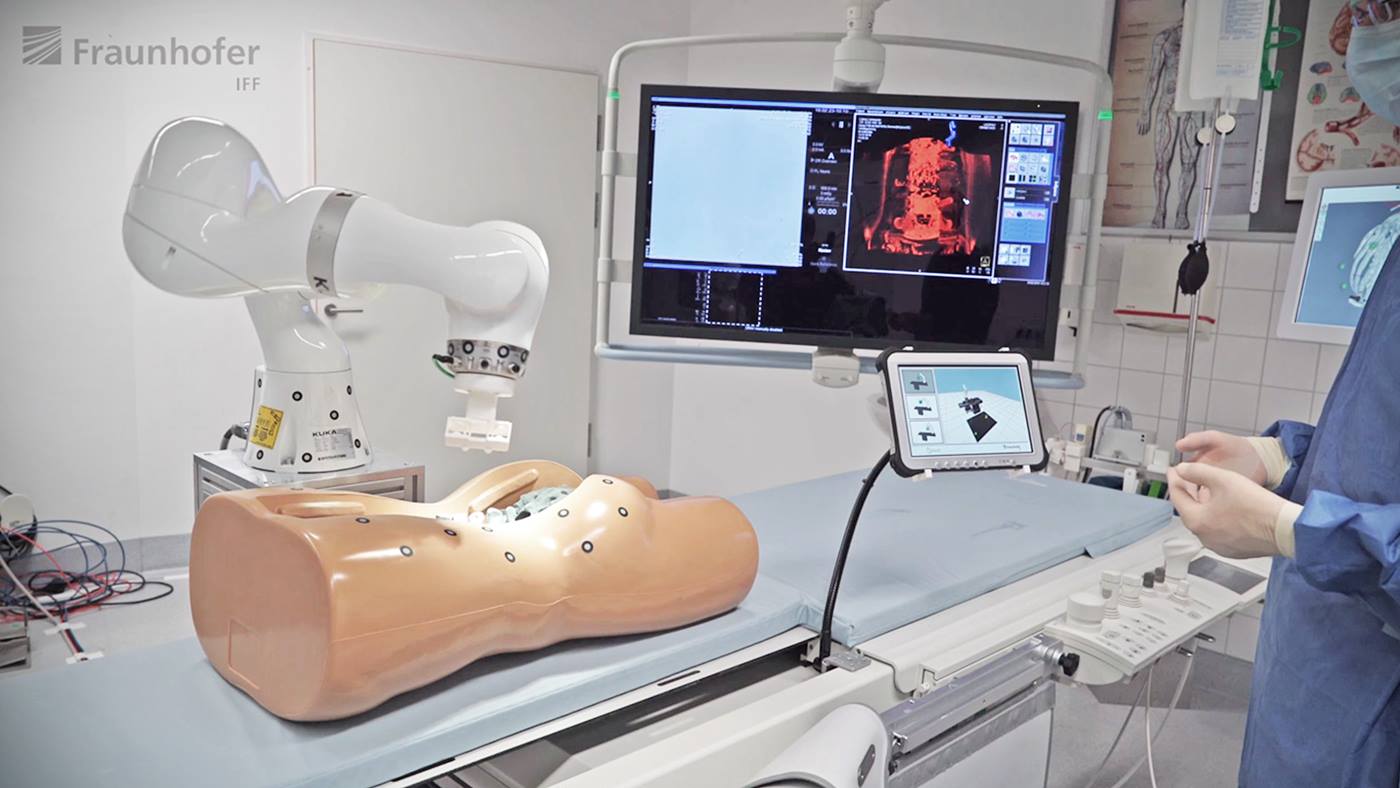
At the Solution Center for Image Guided Local Therapies (STIMULATE) the operations of the future are already being demonstrated, with the assistance of KUKA robots. The hybrid operating room consists of a tactile floor, a flexible operating table, a large image-display robot and a lightweight robot with an operator panel.
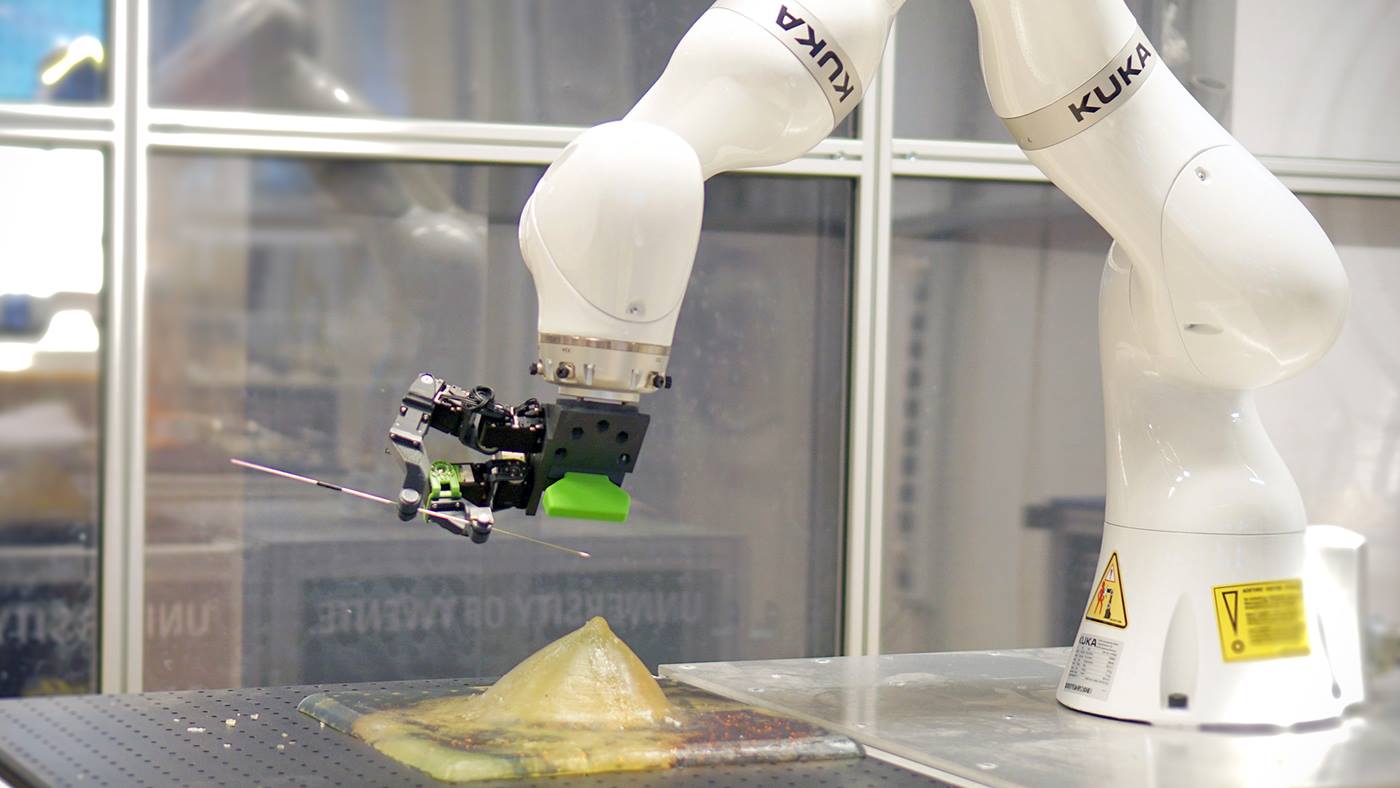
This setup allows for the performance of robot-assisted radio-frequency ablation, in other words, a procedure by which some of a tumor can be destroyed by applying high temperatures. For this, a volumetric map of the patient is first produced using the Siemens Artis zeego system. Then the sensitive KUKA lightweight robot together with the doctor brings to instrument to the required place. The robot ensures that the instrument maintains the correct orientation. The motion ends once the previously identified final position is reached. In this procedure, the interaction between human and robot is critical for achieving a reliable and precise ablation of the tumor.