第三步:弄清激光焊接设备的技术细节
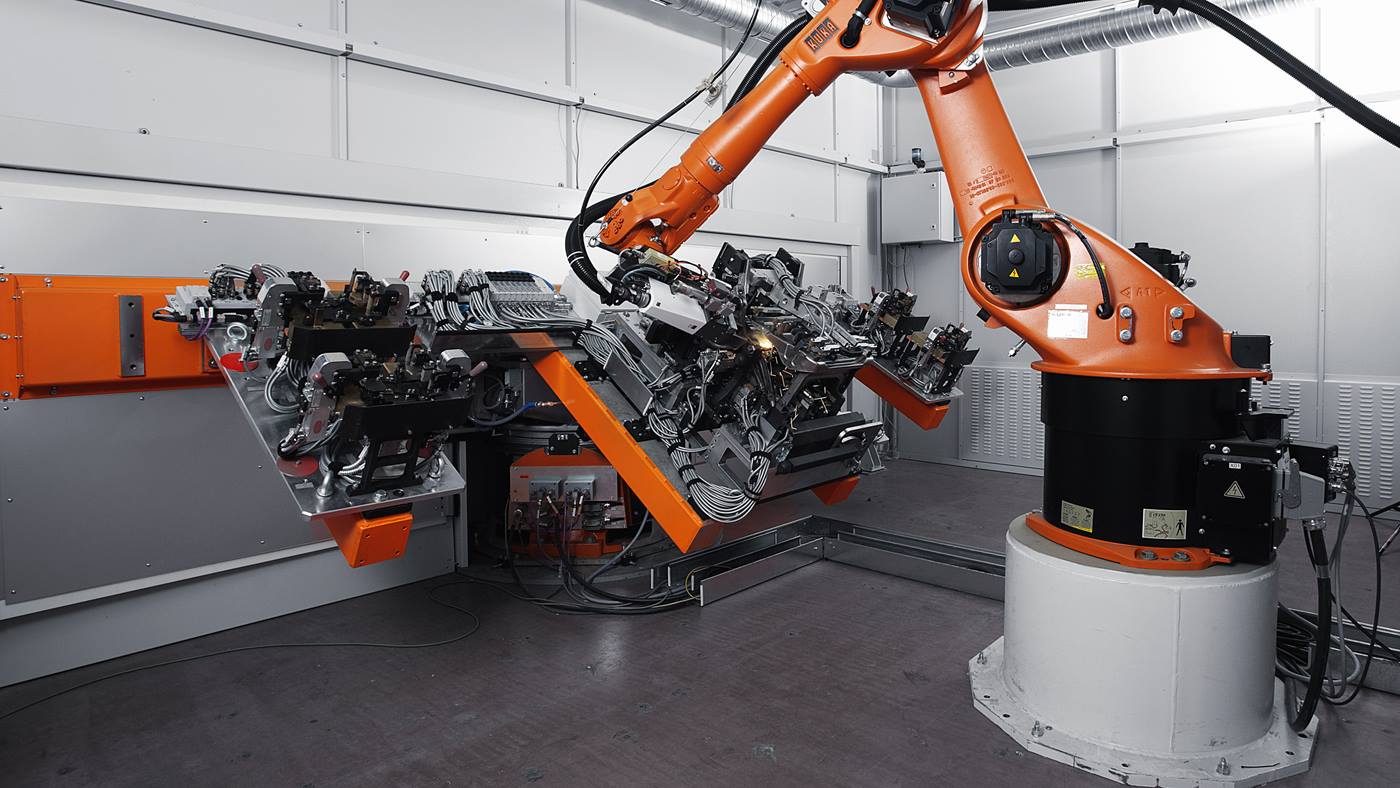
Joachim Burkert 详细介绍说:“我们必须用一台装在紧凑单元中的小型机器人,在极其狭窄的空间内容纳非常多的工件,然后将其准确定位并放置在焊机内。此外,我们还要相互协商确定机器人如何准确运输零件,因为我们的每个动作都要抓取并接合两个工件。”据 Burkert 介绍,wbt automation 在 98% 的自动化项目中都用到了 KUKA 机器人。“为此所需的高精度要求采用一台能够精确测量的机器人,而不是成品的大路货。我们选择了一台型号为 KR10 R1100 的 KR AGILUS 机器人。在给我们发货之前,KUKA 还专门对它再次进行了集中训练。”现在,这台机器人主要能够利用其激光传感系统检查工件的位置,并除了四指抓爪外,还使用一根细的真空吸管来精确定位每一片盖板玻璃。