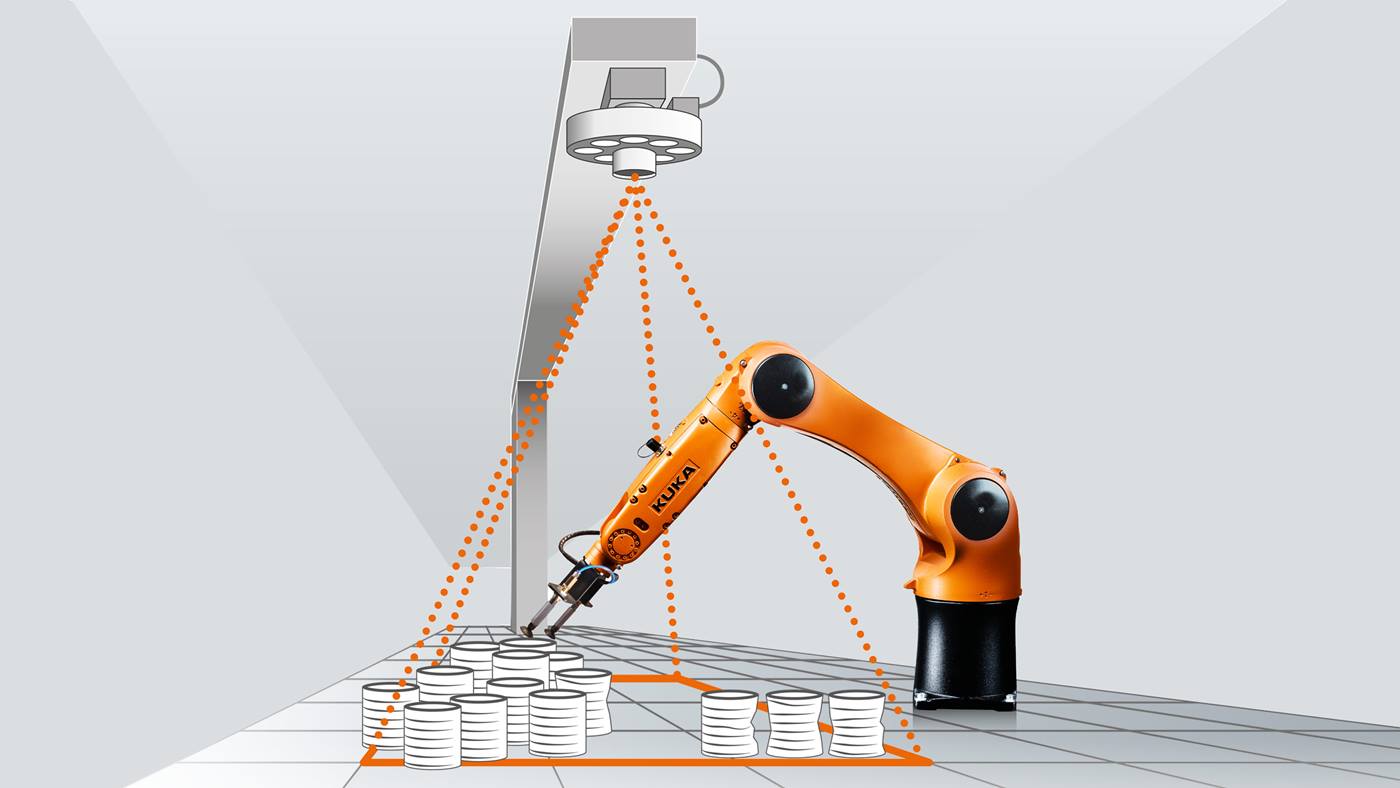
ทำให้เชื่อมั่นในการจดจำตำแหน่งแบบ 3D และการจับเวลา
ซอฟท์แวร์การจำลองแบบ 3D ของบริษัท HBi Robotics GmbH ที่ได้นำมาใช้งานในนี้ด้วย มีไว้สำหรับความยืดหยุ่น ขอบเขตการรบกวนในส่วนหน้าจะถูกพบเห็นจากการสังเกตอย่างละเอียดถี่ถ้วนของกระบวนการเคลื่อนไหวด้วยการจดจำตำแหน่งแบบ 3D นอกเหนือจากนี้ ยังสามารถช่วยเหลือการคำนวณรอบเวลางานที่แม่นยำของพื้นที่ออโตเมชั่นที่ซับซ้อนได้
 หุ่นยนต์ขนาดเล็กของ KUKA จับแผ่นคลัตช์ที่ไม่ได้จัดเรียงเป็นระเบียบ
หุ่นยนต์ขนาดเล็กของ KUKA จับแผ่นคลัตช์ที่ไม่ได้จัดเรียงเป็นระเบียบ
หุ่นยนต์ขนาดเล็กของ KUKA สามารถนำมาใช้งานได้อย่างยืดหยุ่น
โซลูชั่นนี้จัดการให้แผ่นคลัตช์วางซ้อนกันได้อย่างสม่ำเสมอและแม่นยำตั้งแต่ต้นปี 2017 หากไม่ทำการผลิตผลิตภัณฑ์อีก สามารถเปลี่ยนการเขียนโปรแกรมของโครงสร้างที่เกี่ยวข้องได้อย่างง่าย ๆ อีกทั้ง การใช้งานกับเครื่องจักรอื่น ๆ ก็สามารถเป็นไปได้