Používáte starší verzi prohlížeče Internet Explorer. Pro optimální zobrazení si prosím svůj prohlížeč aktualizujte
Selektivní pájení dílců robotem KUKA KR AGILUS
U řídicího systému ALNEA-ZEUS podporuje přesnost robotu výrobu s nulovým podílem chyb.
Snížení doby výroby o 50 procent
Firma ALNEA Sp. z.o.o. s hlavním sídlem ve Varšavě nabízí svým zákazníkům individuální vývoj a výrobu mechanických, elektrických nebo pneumatických, částečně nebo plně automatických testovacích přístrojů. Polský podnik se přitom specializoval na selektivní pájení. Řídicí jednotka ALNEA-ZEUS před lety vyvinutá společností ALNEA však vyžadovala dalekosáhlé úpravy, aby mohla i v budoucnu zaručit splnění standardů požadovaných Mezinárodní asociací průmyslu desek plošných spojů a elektroniky (IPC).
Nová verze řídicí jednotky pájení by měla mít nyní přístup ke všem procesních parametrům, jako jsou např. příprava materiálů vhodných pro pájení, jejich přesné umístění nebo zabránění odkapávání pájky mimo pracovní oblast. ALNEA realizovala nový vývoj v úzké spolupráci s firmou KUKA Robotics z Augsburgu. Díky robotu KUKA KR AGILUS bylo možné významně zlepšit přesnost pájení, vyloučit zdroje chyb a zkrátit dobu výrobu o 50 procent.
Pájecí technologie, tak zvaná Trough-Hole-Technology (THT), vyžaduje maximální přesnost. Proměnné parametry jako množství tavidla, doba a teplota předehřevu, doba smáčení nebo teplota pájky mají rozhodující vliv na kvalitu. Navíc se musí zohlednit vlivy materiálu. Malé struktury a vzdálenosti od součástek, které nesmí být potřísněny pájkou, nepřipouštějí chyby. Opravné procesy jsou při použití technologie THT časově i finančně náročné a často je nelze přesně opakovat, navíc nejsou v některých případech ani povoleny.
Cílem elektronického odvětví je proto proces s nulovým počtem chyb. „Spolehlivě kontrolovaný proces selektivního pájení je přitom v očích našich zákazníků rozhodujícím prvním krokem k výrobě s nulovým podílem chyb,“ vysvětluje Krzysztof Kamiński, prezident společnosti ALNEA Sp. Z.o.o.
Eliminace chyb monitorováním procesu a korekcí
Jednou z hlavních příčin chyb v procesu selektivního pájení jsou pájecí můstky, které vznikají například při pájení bez použití olova vlivem nižší hmotnosti slitiny pájky nebo při nedostatečné vrstvě tavidla. Všechny s tím spojené procesní kroky by se proto měly spolehlivě monitorovat. Nesprávně nebo nepřesně umístěné konstrukční skupiny mohou vést v procesu selektivního pájení rovněž k problémům. I monitorování jejich polohy a případně její korekce jsou rozhodující.
Přesnost požadovanou pro tento proces pájení může zaručit jen moderní robot
Kromě dalšího vývoje řídicího systému bylo proto pro firmu ALNEA nutné nainstalovat robot, který provádí pájení a přesně umisťuje komponenty. Při hledání vhodného modelu se ALNEA rozhodla pro spolupráci s firmou KUKA. „Rozhodující byl pro nás odpovídající poměr cena/výkon a vynikající technická podpora týmu KUKA “, vysvětluje.
Řídicí systém KUKA KR C4 splňoval navíc požadavek firmy ALNEA, že se musí uskutečňovat kontrola procesu pomocí jednoduchého ovládacího přístroje. Jeho otevřená architektura totiž podporuje bezproblémovou technickou integraci do stávajícího strojního vybavení.
Malý, rychlý a přesný: KUKA KR 6 R900
ALNEA se rozhodla pro robot KR 6 R900 z řady KR AGILUS jako prototyp. Tato řada přesvědčí mimořádnou rychlostí při současně vysoké přesnosti opakování a preciznosti. Díky symetrické nástavbě využívají roboty KR AGILUS optimálně pracovní prostor. Jejich extrémně štíhlé obrysy pro použití ve zúženém prostoru jsou možné díky přívodům energie uvnitř.
KR 6 R900 zaručuje nejen maximální přesnost a rychlost práce při konstrukci šetřící místo. S nosností až 6 kg a maximálním dosahem 900 mm docílí tento robot navíc přesnosti opakování kroků méně než ±0,03 mm a díky tomu je ideálně vhodný pro požadavky kladené na proces pájení. Zásadně je ale možné s novým řídicím systémem ALNEA-ZEUS kombinovat kromě modelu KR 6 R900 i jiné modely robotů KUKA.
Pájecí buňka s robotem KR 6 R900.
Příkazy přímo přes ovládací přístroj
„Při integraci robotického automatizačního řešení bylo nutné optimálně sladit komunikaci mezi řídicí jednotkou pájecího zařízení a řídící jednotkou robotu“, vysvětluje Kamiński tuto výzvu. K tomu byl nahrán softwarový balíček ke kontrole parametrů selektivního procesu pájení tak říkajíc do paměti robotu. Zákazníci firmy ALNEA tak mohou prostřednictvím ovládacího přístroje KUKA smartPAD robot ovládat přímo ve výrobním procesu.
Komunikací přes ethernet se předávají příkazy na řídicí jednotku ALNEA-ZEUS. Kontrolní přístroj pak provádí příkaz na základě specifického hardwaru a softwaru příslušného zákazníka. Řešení si vystačí bez panelu PLC nebo HMI a také již nevyžaduje žádná další rozhraní.
Výsledek: O 50 procent kratší procesní čas při současné minimalizaci chyb
Robot KUKA KR 6 R900 splňuje přesně na něj kladené úkoly v procesu selektivního pájení: Jednak řídí pohyby páječky, jednak přidržuje desku plošných spojů ve stanovené poloze. Díky robotickému řešení automatizace výroby vyvinutém firmou ALNEA lze dnes pomocí řídicí jednotky spolehlivě monitorovat všechny parametry procesu selektivního pájení. Navíc se všechny údaje poskytované robotem KUKA předávají do výrobního systému a tam se dále využívají.
K tomu patří mimo jiné monitorování přivádění komponent a jejich umisťování a také ovládání další externí výbavy. To přispívá nejen k citelné minimalizaci chyb, ale také k výraznému zvýšení produktivity. „Procesní čas jsme novým řešením zkrátili o 50 procent“, zdůrazňuje Kamiński.
Díky monitorování procesu prostřednictvím ovládacího přístroje je v neposlední řadě minimalizována potřeba školení zaměstnanců zákazníka. Nyní již není nutno využívat tři osoby: specialistu na proces, roboty a řízení. Po krátkém školení dokáže proces a pájecí robot řídit i dělník.
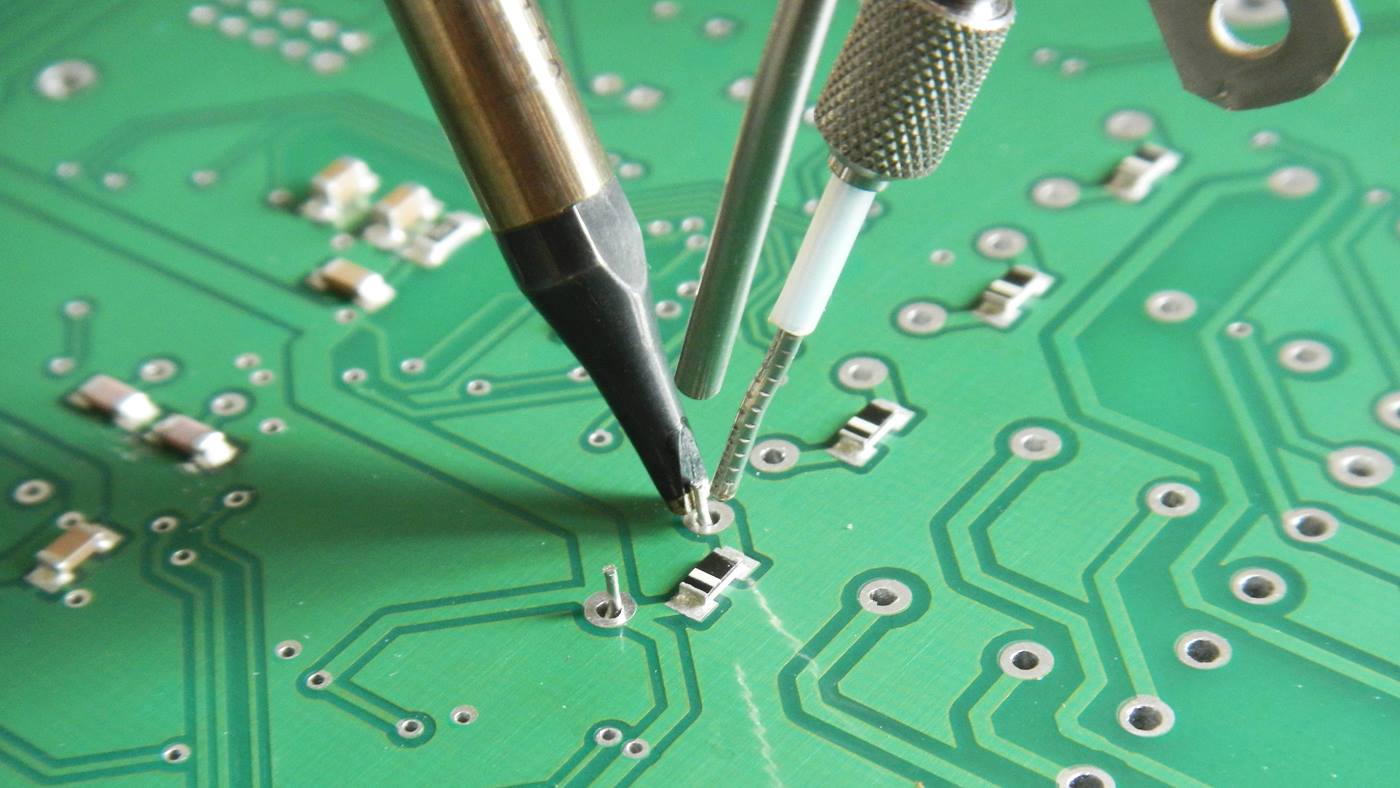
Robot přidržuje desku plošných spojů na místě a řídí pohyb páječky.