Fast Robotics
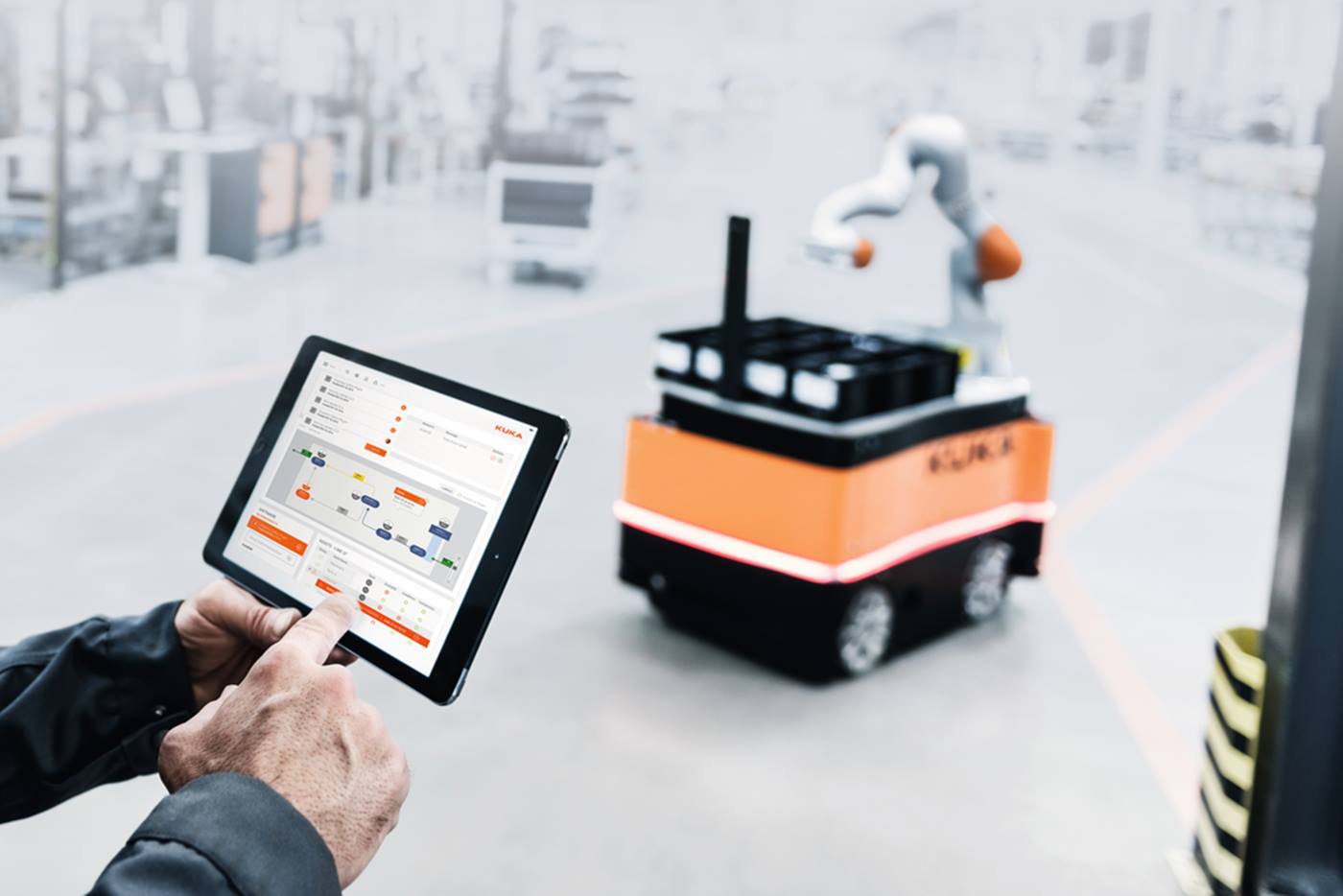
Die Entwicklung eines innovativen Steuerungskonzepts ermöglicht die Überwachung, Lokalisierung, Konfiguration und Steuerung von mobilen und stationären Robotern mittels einer Mobilfunk-Infrastruktur in Echtzeit.
Heutige drahtlose Kommunikationssysteme bleiben oft hinter den Bedürfnissen und Anforderungen aus der Industrie zurück. Sie sind beispielsweise nicht in dem geforderten Maße echtzeitfähig oder nicht dazu in der Lage, dynamisch Teilnehmer in das Kommunkations-Funknetzwerk aufzunehmen und dabei Dienstgüten („Quality of Service“) wie Durchsatzrate, Antwortzeit und Ausfallsicherheit zu garantieren. Dies ist insbesondere wichtig, wenn sich in Zukunft mobile Roboter untereinander und mit anderen stationären Aktoren und Sensoren dynamisch zu kooperativen Arbeitsverbänden zusammenschließen.
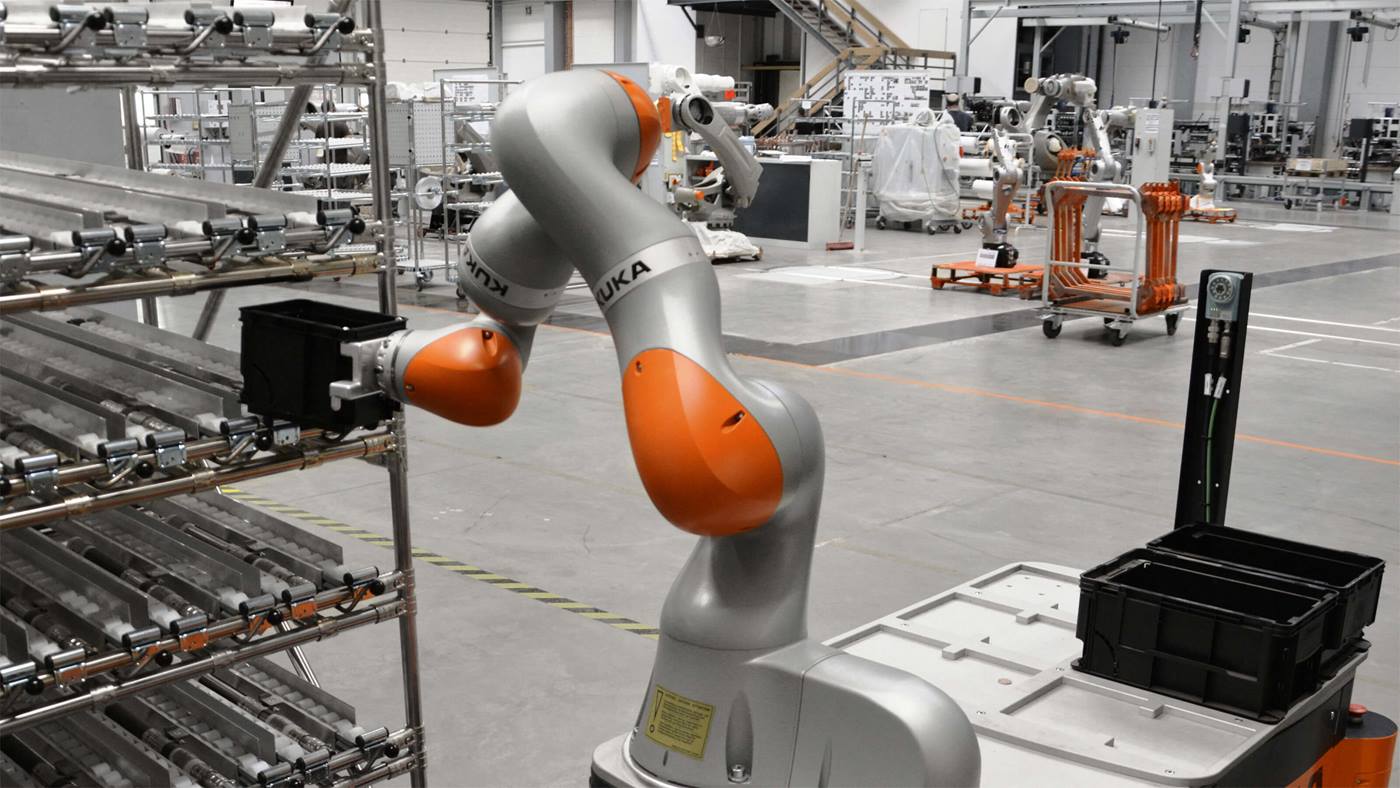
Im vom Bundesministerium für Bildung und Forschung (BMBF) geförderten Projekt „fast robotics“ arbeiten wir deshalb über einen Zeitraum von drei Jahren zusammen mit den innovativen mittelständischen Unternehmen O&O und R3Coms, dem Fraunhofer-Institut für Fabrikbetrieb und -automatisierung sowie der Technischen Universität Dresden an der Entwicklung eines innovativen Steuerungskonzepts, mit dem Roboter nicht nur untereinander, sondern auch mit fest in ihrer Einsatzumgebung installierten Sensoren und mit mobilen Endgeräten verlässlich drahtlos kommunizieren können.
So sollen sowohl mobile als auch stationäre Roboter mittels einer Mobilfunk-Infrastruktur in Echtzeit überwacht, lokalisiert, konfiguriert und gesteuert werden. Auch Cloud-Dienste werden genutzt, um die Integration weiterer Sensoren und Komponenten zu vereinfachen. Ziel ist es, durch die intelligente Vernetzung der Roboter untereinander sowie mit ihrer Umwelt dem Menschen ein Mehr an Flexibilität und Funktionalität bereitzustellen und ihn von monotonen, körperlich anstrengenden Arbeiten zu entlasten und ihm ein produktives Arbeiten zu ermöglichen.
Weiter Informationen zum Projekt finden Sie hier.