Fast robotics
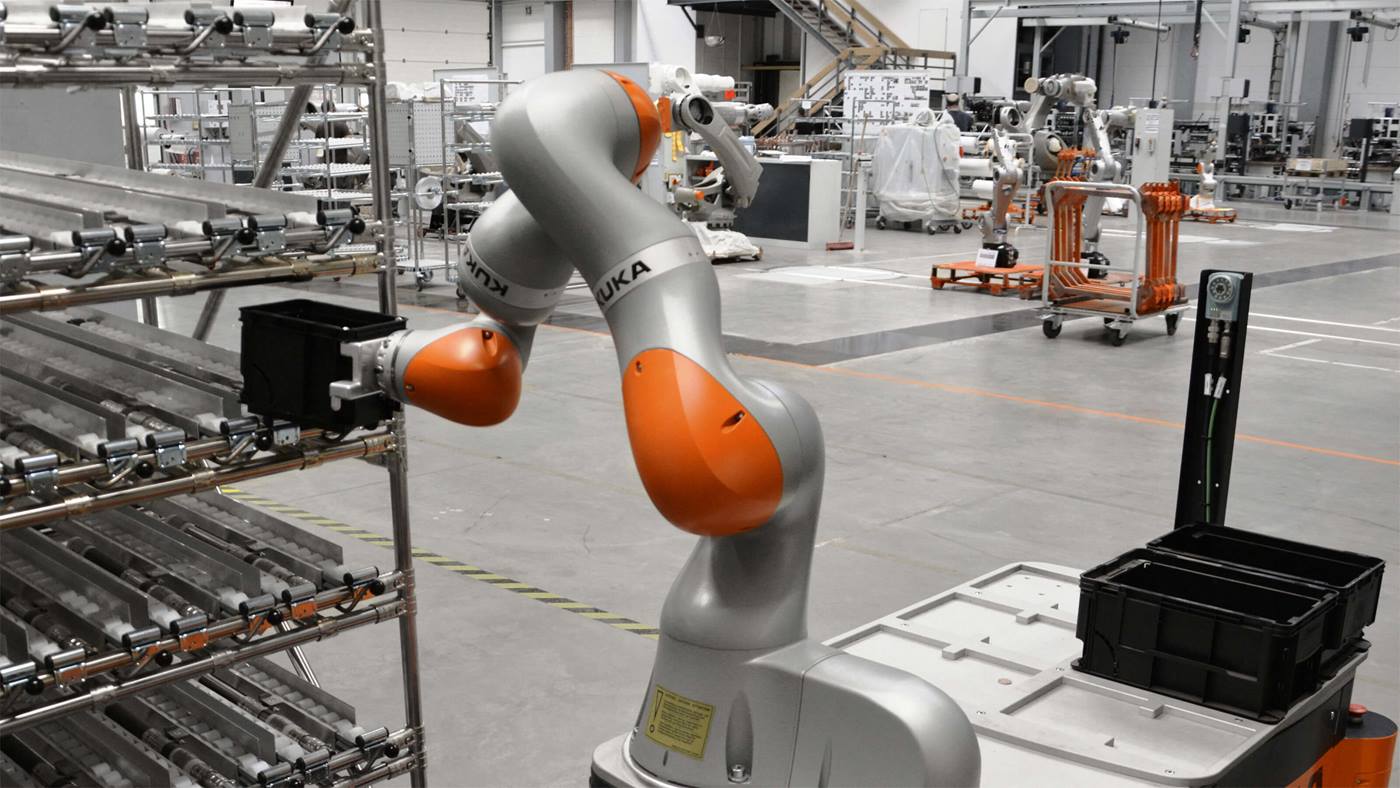
The development of an innovative control concept enables the monitoring, localization, configuration and control of mobile and stationary robots in real time via a mobile telecommunications infrastructure.
Today’s wireless communication systems often lag behind the needs and requirements of industry. They are, for example, not real-time capable to the extent required or are not in a position to dynamically incorporate devices into the wireless communication network and thus guarantee quality of service in terms of throughput rates, response time and reliability. This is particularly important if mobile robots are to dynamically collaborate among themselves and with other actuators and sensors in cooperative work groups in the future.
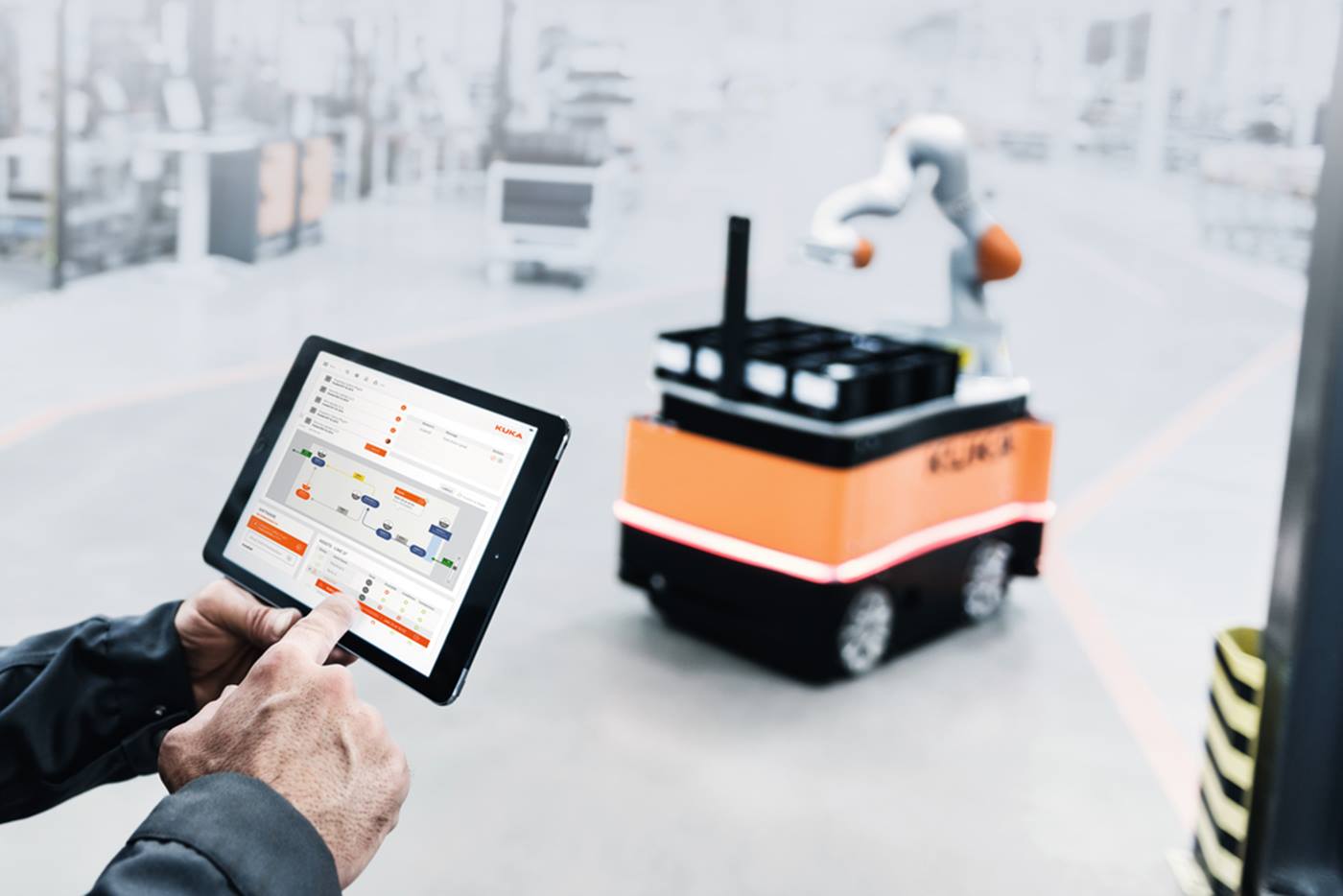
In the “fast robotics” project sponsored by the Federal Ministry of Education and Research (BMBF), we are therefore working over a period of three years together with the innovative medium-sized companies O&O and R3Coms, the Fraunhofer Institute for Factory Operation and Automation and the Technical University of Dresden to develop an innovative control concept in which the robots can reliably communicate via a wireless network not only with each other but also with fixed sensors installed in their operating environment and with mobile end devices.
This is intended to enable both mobile and stationary robots to be monitored, localized, configured and controlled in real time via a mobile telecommunications infrastructure. Cloud services are also used to simplify the integration of further sensors and components. The goal is to use the intelligent networking of robots among themselves and with their environment to provide humans with greater flexibility and functionality, to free them from monotonous and physically strenuous activities and to enable more productive work.
You can find further information about the project here.